So, I’m having trouble getting dual y motors to work with two drivers. If they are both plugged in to the board only one moves, the side I typically would call y2. But if I unplug either one the one still plugged in moves fine…
I’ve setup other DLC32 variants and do not remember anything like this…. Is there Something in the firmware or GRBL that will fix this? I’ve rewired including the swap you do if you were running both from one driver… same thing.
Tried this on both available versions of the firmware for this board. Is this a situation where I have to compile a custom build? That’s over my head!
Usually both are wired in parallel, so there is no software setting that could change this. Did you adjust the reference voltage to get enough power for two motors?
Do you mean the potentiometer or tiny rheostat type thing on the drivers? If so, yes. If that’s not what you mean then I need instruction.
Sorry, I’m not new to lasers but I’ve never run in to this and I don’t have a background in electronic
Right, this is the Max version I’d think it would support two drivers there are a z and A as well.
If that is my issue, is there a way to map steps to another axis port to run the driver?
Clearly there is one more port than space for a driver….. damn it all to hell.
Anyway if it’s helpful, the steppers are are higher torq and consequently eat more electricity so the place I got them suggested tb675109 drivers and they are what I’m using
In your picture,you have 4 drivers and 5 sockets. The Y output uses one driver module. You only have one adjustment for the Yaxis output. Are you sure that driver module can handle the full current of the two stepper motors you are using?
Is there a way to clone an axis and assign to z or x?
I ask this because there is no way any internal driver I’ve seen that would run both of these well.
It looks like GRBL can do that…
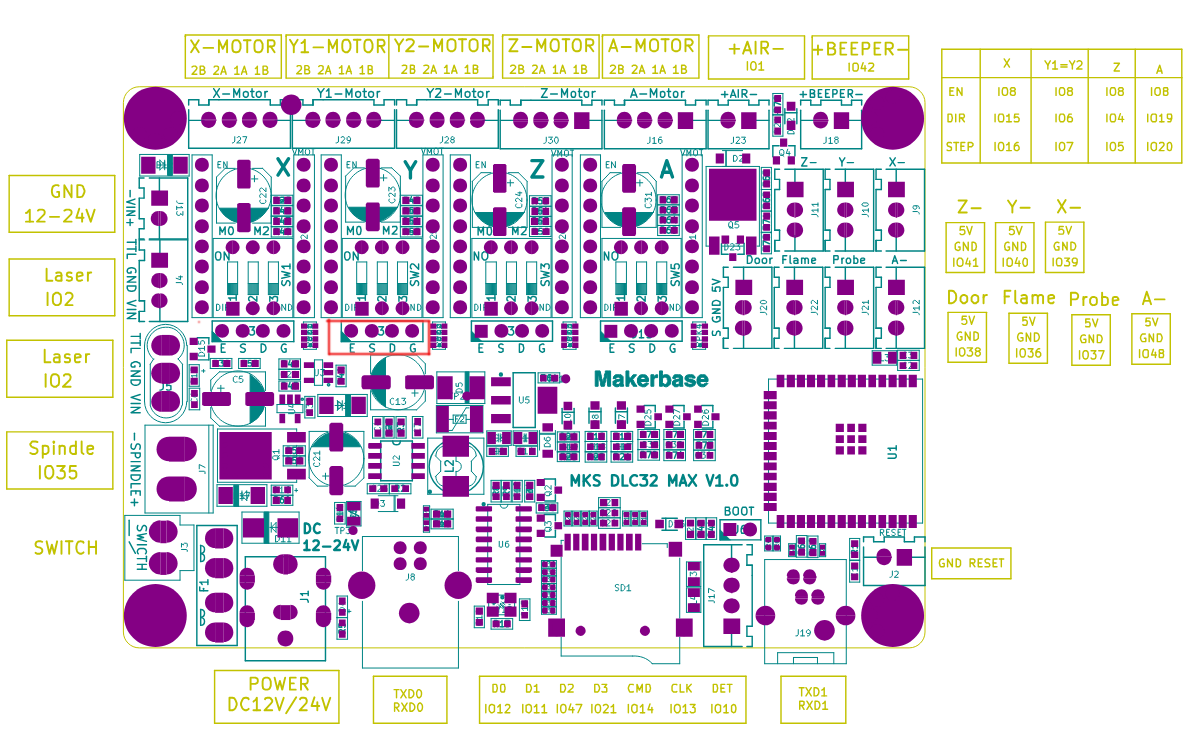
I ran NEMA23 on my China Blue via the motor drivers on my DLC32, not a MAX version. I picked up the Y signals here (in RED) and ran them to my existing motor driver. Current limits are close to maximum.
The board can drive two steppers on the y-axis, and that’s a very common use case. But most lasers use Nema17, 1.2A max, I’d say. If you have stronger motors, you will soon reach the limits, I guess.
Yes, that’s what I’ve discovered, so now, it looks l I need to get the signal to a second driver. I’d assumed the two drivers were for the y axis.
I see in the GRBL docs running two individual y axis one of which coming from a or z can be done on Arduino setups…. Does this also apply to the dlc32 type boards?
Also, apologies GitHub theoretically has the documentation I’m seeking but with the MKS boards about half of the links are 404s including example config files and the like.
Yes and no. Of course, this can be done, it’s just a matter of defining which pins to use, but I don’t know if common firmwares allow this out of the box. FluidNC might as well as grblHAL. Those would be the first I’d look at.
The MKS firmware is hard to use, there is not much documentation and you would have to dig your own way through it, I guess
Side note: I’d not use one driver on board and a second driver externally. Use two external drivers that get the same signals from the board (Y-cables). Do not mix different drivers for the same axis. The first sentence sounded like that.
I just ordered two external drivers as this is for work so I don’t have time to experiment but I have a number of other boards I can put fluidnc or grblhal on, what are people’s preferences with those?
I just built a new machine with the same controller.
I went with grblHAL since I’ve used it before and it does everything I need. Never used FluidNC, I see too many complaints about it so I passed.
grblHAL will allow you to use the A axis for the Y2, including the limit switch if you put one on both Y’s.
It also has a setting to reverse the slaved side so you can wire them all the same.
The only negative is no support for a screen if that matters to you.
Y axis, motors on each end of the drive shaft, need to be driven in opposite directions.
Using external high current drivers, connected both pulse and direction in parallel, wire the motors, on second motor, wires A+ and A- are swapped.
Set each external driver current and micro-stepping the same to suit your motors.