Hi. I have just purchased the above machine. I use a Lenovo Ideapad which runs on Windows 64 bit and have (trial) Lightburn 1.1.01.when doing the initial set up I set the x axis at 400 & y axis at 400. Since Having the problem I reset to 390 x 390. and still have the problem. On start up the laser head wants to go to hone which seems way beyond the 0 X0 "machine home ie somewhere beyond -0 x -0. There is a terrible noise from the laser head motor when it hits the metal frame and as it tries to go further “south”.
I am not very computer literate so any help will be very much appreciated even if it is just to point me to an existing fix/blog.
Many thanks
I was under the impression that the A5 Pro did not have limit switches and thus should not have a homing operation.
Is this when first powering on the laser or when first connecting to LightBurn? If this happens when first turning on power there may be something wrong with your configuration. If when connecting to LightBurn then you may have enabled “Auto-home on startup” inappropriately. Go to Edit->Device Settings and disable “Auto-home on startup”.
Normally the laser configuration would prevent this from happening.
If that’s not the issue then please do the following:
- confirm that your laser does or does not have limit switches. These can be mechanical, optical, or inductive and will be located near the corners in the direction of homing.
- Disconnect the motors, turn on the laser, connect LightBurn, and then open the Console window in LightBurn and type these commands into the entry field one at a time:
$I
$$
Copy and paste the output in a response.
Hi. Thank you for your response and apologies for the delay getting back to you.
I have determined the problem is when connecting to Lightburn. I have as you suggested disabled “Auto-home on startup” with no success. There are two mechanical limit switches, one on the X axis arm and one I put in following the assembly instructions. Hopefully this message that comes up on the console will be helpful.
Wait. I’m confused. Do you have an A5 Pro or an X7 Pro? Those are very different machine.
A5 I believe doesn’t normally come with limit switches. Did these come with your machine or these were an add-on? If X7 then that machine does come with limit switches from what I remember.
So when the laser head starts moving in the home direction, does it actually engage the limit switches physically? Is something impeding the laser head from triggering the switches? What happens if you trigger the switches by hand?
I’ll still need you to provide these details please:
- Disconnect the motors, turn on the laser, connect LightBurn, and then open the Console window in LightBurn and type these commands into the entry field one at a time:
$I
$$
$#
?
Copy and paste the output in a response.
The M4 variable spindle warning intrigues me.
Your device says that it uses GRBL version 1.1
Did you select GRBL-M3 or GRBL-LPC in manual set up and then rename it to GRBL - AtomstackA5 believing that your GRBL 1.1 was built before 1.1e?
I believe regular GRBL would be the correct protocol for your Atomstack device.
Hi. Sorry I may have contributed to the confusion. I have according to the label on the machine an Atomstack A5 Pro+ although when I look closely at the installation manual it says it is for an “Atomstack A5 M Series Laser”. What I refereed to as a switch is labelled in the manual as a “Y axis limit column” (refer ATOMSTACK A 5 Pro Installation Manual (Page 9 of 13) | ManualsLib , page 9). In other words it is a physical stop. Having looked at the manual referenced in the link given above I see it is for an Atomstack A5 Pro. I will have to compare the assembly steps/instructions with what I did following the physical manual that came with the machine. Due to commitments over the next day or so I will come back in about 30 hours. Many thanks for your consideration of this issue.
Roger
Hi
I chose, GRBL (that was all it was called - no version #'s were given) and renamed it “GRBL - AtomstackA5” for my own purposes. Two other options came up but I assumed that if I had to choose either of those options the manual would have told me.
Many thanks for your consideration of this issue.
Roger
Ok. What confused me was the message from the controller showing X7. Must be generic firmware for multiple machines.
I want to break-down the troubleshooting into parts.
Homing Trigger Initiation Validation
As for the original homing issue you’re saying that it only occurs when LightBurn attempts to connect. Try this to confirm details on this.
- Close LightBurn
- Turn off laser if not already off
- Turn on laser. Note if any movement.
- Open LightBurn.
- If LightBurn doesn’t automatically connect to the laser, check the Ports pull-down and pick the right port. Note if any movement at connection time.
- If movement at LightBurn connection and not at laser on time then also do the following:
6a. turn off laser while leaving LightBurn running.
6b. enable “Show all” in Console window
6c. turn on laser
6d. if LightBurn has not connected automatically, then right click Devices button.
6e. Capture all output from Console window and paste here.
Be prepared to pull power as to avoid crashing.
Limit Switch Function Validation
If your limit switches were functioning correctly they should prevent the crashing that originally occurred. Need to find out if they’re working and why they’re not functioning correctly to stop the crash.
- Turn on laser and connect to LightBurn
- Press one of the limit switches. Check for alarm/error in Console.
- Power cycle laser and connect to LightBurn
- Press other limit switch. Check for alarm/error in Console.
Post the output of Console here if any alarms were generated.
If you get an alarm generated, check for mechanical engagement of the laser head to both switches. Is one or both switches not engaging properly during the homing cycle? There may be something impeding travel. Normally it would be obvious if one switch is engaging but not the other because it will always crash only along one axis while the other is safely homed.
GRBL Setting Gathering
You can probably do this with power disconnected as long as your controller can be powered exclusively by USB. Or disconnect the motors while you do this.
Run these commands in Console:
$I
$$
$#
?
Copy and paste these results in a reply.
Re Homing Trigger initiation Validation.
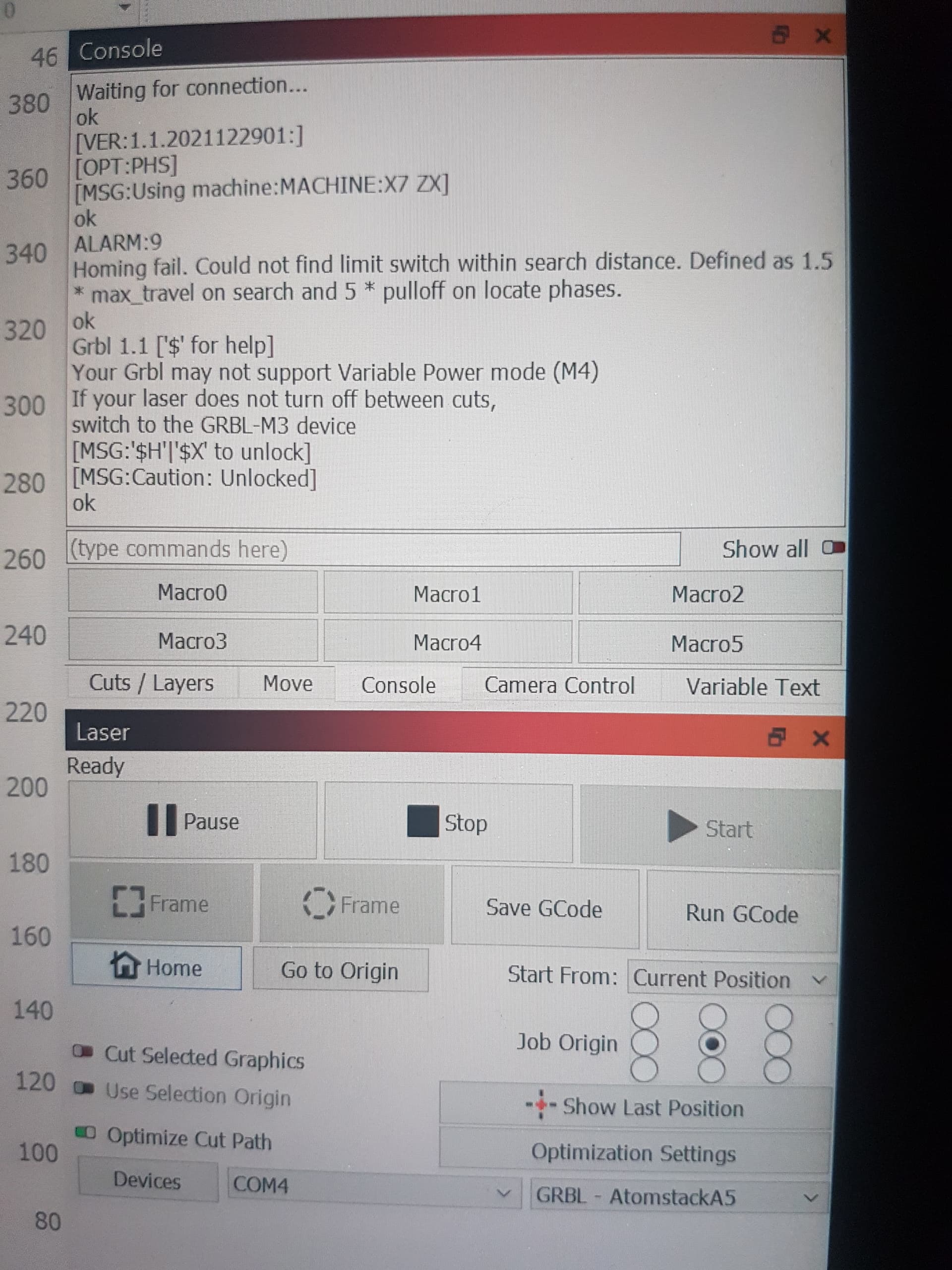
Following the steps there is no movement at step 3 ie turning on the laser. At step 5 there is no movement (the correct port does connect) . But if one selects “Home” the problem arises with the following message coming up " Waiting for connection…
�ok
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
ALARM:9
Homing fail. Could not find limit switch within search distance. Defined as 1.5 * max_travel on search and 5 * pulloff on locate phases.
ok
Grbl 1.1 [’$’ for help]
Your Grbl may not support Variable Power mode (M4)
If your laser does not turn off between cuts,
switch to the GRBL-M3 device
[MSG:’$H’|’$X’ to unlock]
[MSG:Caution: Unlocked]
ok
Re: GRBL Setting Gathering
With the motors and laser disconnected the following message comes up:
Waiting for connection…
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
$I
$$
$#
?
<Idle|WPos:-51.000,-51.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
ok
$0=10
$1=25
$2=0
$3=0
$4=0
$5=1
$6=0
$10=0
$11=0.010
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=3
$24=300.000
$25=3000.000
$26=250.000
$27=1.000
$30=1000.000
$31=0.000
$32=1
$37=1
$100=80.000
$101=80.000
$102=80.000
$103=100.000
$104=100.000
$105=100.000
$110=6000.000
$111=6000.000
$112=6000.000
$113=1000.000
$114=1000.000
$115=1000.000
$120=1000.000
$121=1000.000
$122=1000.000
$123=200.000
$124=200.000
$125=200.000
$130=410.000
$131=400.000
$132=200.000
$133=300.000
$134=300.000
$135=300.000
ok
ok
[G54:-400.000,-400.000,0.000]
[G55:0.000,0.000,0.000]
[G56:0.000,0.000,0.000]
[G57:0.000,0.000,0.000]
[G58:0.000,0.000,0.000]
[G59:0.000,0.000,0.000]
[G28:0.000,0.000,0.000]
[G30:0.000,0.000,0.000]
[G92:0.000,0.000,0.000]
[TLO:0.000]
[PRB:0.000,0.000,0.000:0]
ok
ok
ok
So, is the problem the -400’s at G54? If so, how does one correct this?
Many thanks
Roger
There’s a lot about your setup that’s odd. I’m going to ignore homing and the limit switches for now.
Possibly. It could be there for a reason but let’s find out.
Need a bit more information.
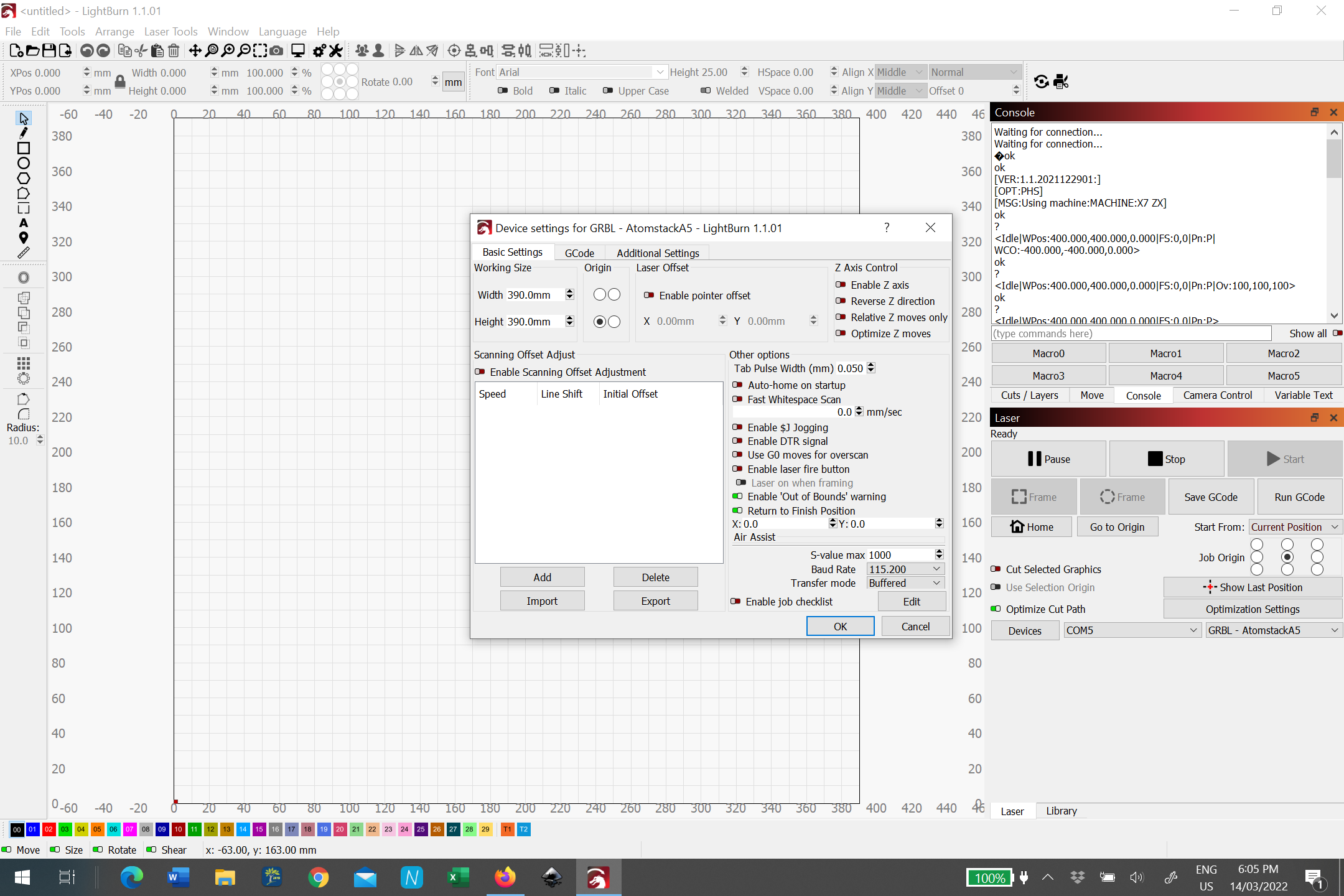
- Take a screenshot of Device Settings
- Turn off laser and turn it back on with the laser at front left.
- Enter
?in Console and return results - Jog to Top-left and enter
?in Console and return results - Jog to Top-right and enter
?in Console and return results - Job to Bottom-right and enter
?in Console and return results
-
Screen Shot Device settings:
-
Front left:
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
- Top left:
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|Ov:100,100,100>
ok
- Top right:
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P>
ok
- Bottom-right:
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P>
ok
Thanks for your time
Roger
Thanks for going through that. Can you confirm that you jogged to the positions indicted using the buttons in the Move window? Or did you move the laser head by hand? Moving by hand wouldn’t work in this case.
All 4 positions are reading the exact same which is not good.
If you moved by hand can you rerun using the jogging controls? If not just report back.
Oops. Sorry. This time:
(Having done everything I might have spotted a problem to save you going cross eyed - per extract from below:
Idle|WPos:400.000,460.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
Starting stream
error:20
Unsupported or invalid g-code command found in block.
On or near line 2:
Stream completed in 0:00
<Idle|WPos:400.000,470.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000> )
This is the console reading from laser off then on at front (bottom) left and then jogging to top left:
Waiting for connection…
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
[MSG:X Axis Standard Stepper Step:I2SO(1) Dir:I2SO(2) Disable:I2SO(0) Limits(0.000,410.000)]
[MSG:Y Axis Standard Stepper Step:I2SO(5) Dir:I2SO(6) Disable:I2SO(0) Limits(0.000,400.000)]
[MSG:Laser spindle on Pin:GPIO(22), Enbl:None, Freq:1000Hz, Res:16bits Laser mode:On]
[MSG:X Axis limit switch on pin GPIO(36)]
[MSG:Y Axis limit switch on pin GPIO(35)]
Grbl 1.1 [’$’ for help]
Your Grbl may not support Variable Power mode (M4)
If your laser does not turn off between cuts,
switch to the GRBL-M3 device
[MSG:’$H’|’$X’ to unlock]
Grbl 1.1 [’$’ for help]
[MSG:’$H’|’$X’ to unlock]
[MSG:Caution: Unlocked]
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|Ov:100,100,100>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,410.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,420.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,430.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,440.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,450.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,460.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
Starting stream
error:20
Unsupported or invalid g-code command found in block.
On or near line 2:
Stream completed in 0:00
<Idle|WPos:400.000,470.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,480.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,490.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,500.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,510.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,520.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,530.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,540.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,550.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,560.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,570.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,580.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,590.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,600.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,610.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,620.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,630.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,640.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,650.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,660.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,670.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,680.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,690.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,700.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,710.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,720.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,730.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,740.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,750.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,760.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,770.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,780.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,790.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,800.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
5 Jogging Top left to top right
Waiting for connection…
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
[MSG:X Axis Standard Stepper Step:I2SO(1) Dir:I2SO(2) Disable:I2SO(0) Limits(0.000,410.000)]
[MSG:Y Axis Standard Stepper Step:I2SO(5) Dir:I2SO(6) Disable:I2SO(0) Limits(0.000,400.000)]
[MSG:Laser spindle on Pin:GPIO(22), Enbl:None, Freq:1000Hz, Res:16bits Laser mode:On]
[MSG:X Axis limit switch on pin GPIO(36)]
[MSG:Y Axis limit switch on pin GPIO(35)]
Grbl 1.1 [’$’ for help]
Your Grbl may not support Variable Power mode (M4)
If your laser does not turn off between cuts,
switch to the GRBL-M3 device
[MSG:’$H’|’$X’ to unlock]
Grbl 1.1 [’$’ for help]
[MSG:’$H’|’$X’ to unlock]
[MSG:Caution: Unlocked]
ok
[VER:1.1.2021122901:]
[OPT:PHS]
[MSG:Using machine:MACHINE:X7 ZX]
ok
?
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
<Idle|WPos:400.000,400.000,0.000|FS:0,0|Pn:P|Ov:100,100,100>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,410.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,420.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,430.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,440.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,450.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,460.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
Starting stream
error:20
Unsupported or invalid g-code command found in block.
On or near line 2:
Stream completed in 0:00
<Idle|WPos:400.000,470.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,480.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,490.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,500.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,510.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,520.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,530.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,540.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,550.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,560.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,570.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,580.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,590.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,600.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,610.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,620.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,630.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,640.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,650.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,660.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,670.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,680.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,690.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,700.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,710.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,720.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,730.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,740.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,750.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,760.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,770.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,780.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,790.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:400.000,800.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
6 Bottom right to bottom left
?
<Idle|WPos:830.000,810.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
<Idle|WPos:830.000,810.000,0.000|FS:0,0|Pn:P|Ov:100,100,100>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,800.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,790.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,780.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,770.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,760.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,750.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,740.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,730.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,720.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,710.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,700.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,690.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,680.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,670.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,660.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,650.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,640.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,630.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,620.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,610.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,600.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,590.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,580.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,570.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,560.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,550.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,540.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,530.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,520.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,510.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,500.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,490.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,480.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,470.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,460.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,450.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,440.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,430.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,420.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,410.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
<Idle|WPos:830.000,400.000,0.000|FS:0,0|Pn:P|WCO:-400.000,-400.000,0.000>
ok
Starting stream
[MSG:Program End]
Stream completed in 0:00
There seems a lot of code here.
Again many thanks.
Roger
It was very difficult to parse through that and hard to know what output correlated to which location.
I assume your annotations were meant to narrate the log that followed the comment, correct? If so, seems one location was missing. And if I take your comments at face value there’s something extremely wrong with your controller because there’s a jump in the coordinates and in the last set of data you indicate movement from bottom-right to bottom-left and yet X coordinate doesn’t while Y coordinate does, not mentioning that starting X position had jumped there without indication as to how.
I’m going to assume for the moment that there may have been some problem with the capture and that the 4 corners of your bed look something like this:

If so, then yes, the offset is unnecessary and should be removed.
Run this in Console:
G10 L2 P1 X0 Y0
Power cycle laser with head at front-left and test operation. Keep in mind that you will always need to start the laser from the front-left.
You may want to change your work area in device settings to match 410x400 assuming things works.
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.