I just setup fluidnc on this board (amazon links)
HiLetgo UNO R3 D1 R32 ESP32 https://a.co/d/gJoYMD0
With a arduino cnc shield
https://a.co/d/cYlnj3h
Using these to break out the limit switches
https://a.co/d/9sLBbhp
Here is my basic config.yaml file that works with that setup. Note the limit switch pin locations are different than what the shield uses.
name: “Wemos R1 ESP32”
board: “Wemos R1 ESP32”
stepping:
engine: RMT
idle_ms: 250
dir_delay_us: 1
pulse_us: 2
disable_delay_us: 0
axes:
shared_stepper_disable_pin: gpio.12
x:
steps_per_mm: 100
max_rate_mm_per_min: 6000
acceleration_mm_per_sec2: 200
max_travel_mm: 900
homing:
cycle: 2
mpos_mm: 10
positive_direction: false
motor0:
limit_all_pin: gpio.39:low
stepstick:
direction_pin: gpio.16
step_pin: gpio.26
y:
steps_per_mm: 100
max_rate_mm_per_min: 6000
acceleration_mm_per_sec2: 200
max_travel_mm: 900
homing:
cycle: 2
mpos_mm: 10
positive_direction: false
motor0:
limit_all_pin: gpio.4:low
stepstick:
direction_pin: gpio.27
step_pin: gpio.25
z:
steps_per_mm: 800
max_rate_mm_per_min: 2000
acceleration_mm_per_sec2: 25
max_travel_mm: 1000
homing:
cycle: 1
mpos_mm: 10
positive_direction: true
motor0:
limit_all_pin: gpio.35:low
stepstick:
direction_pin: gpio.14
step_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
Laser:
pwm_freq: 5000
output_pin: gpio.32
enable_pin: gpio.33
direction_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
tool: 100
speed_map: 0=0.000% 1000=100.000%
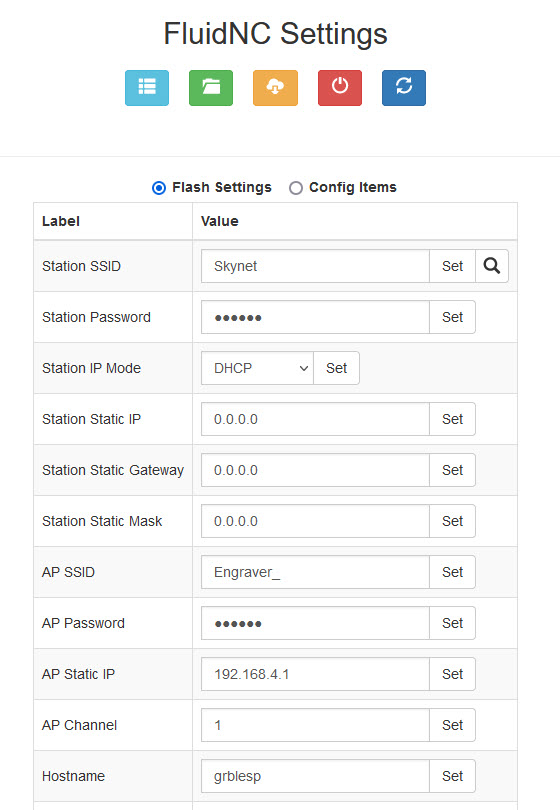
in the fluidnc web interface the start/message I am using :
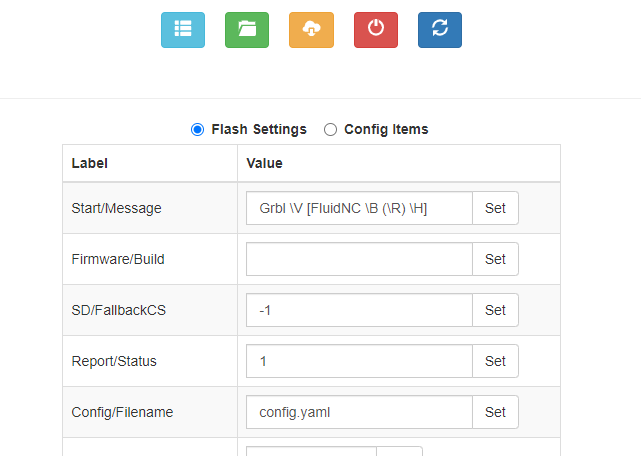
Grbl \V [FluidNC \B (\R) \H]
the config.yaml is uploaded by hitting that green folder button and needs to match the name in the screenshot to work. took me like 5 hours to google everything and get it setup, what board are you running?