Hello,
i have GRBL 1.1f with homing enabled and hard limits.
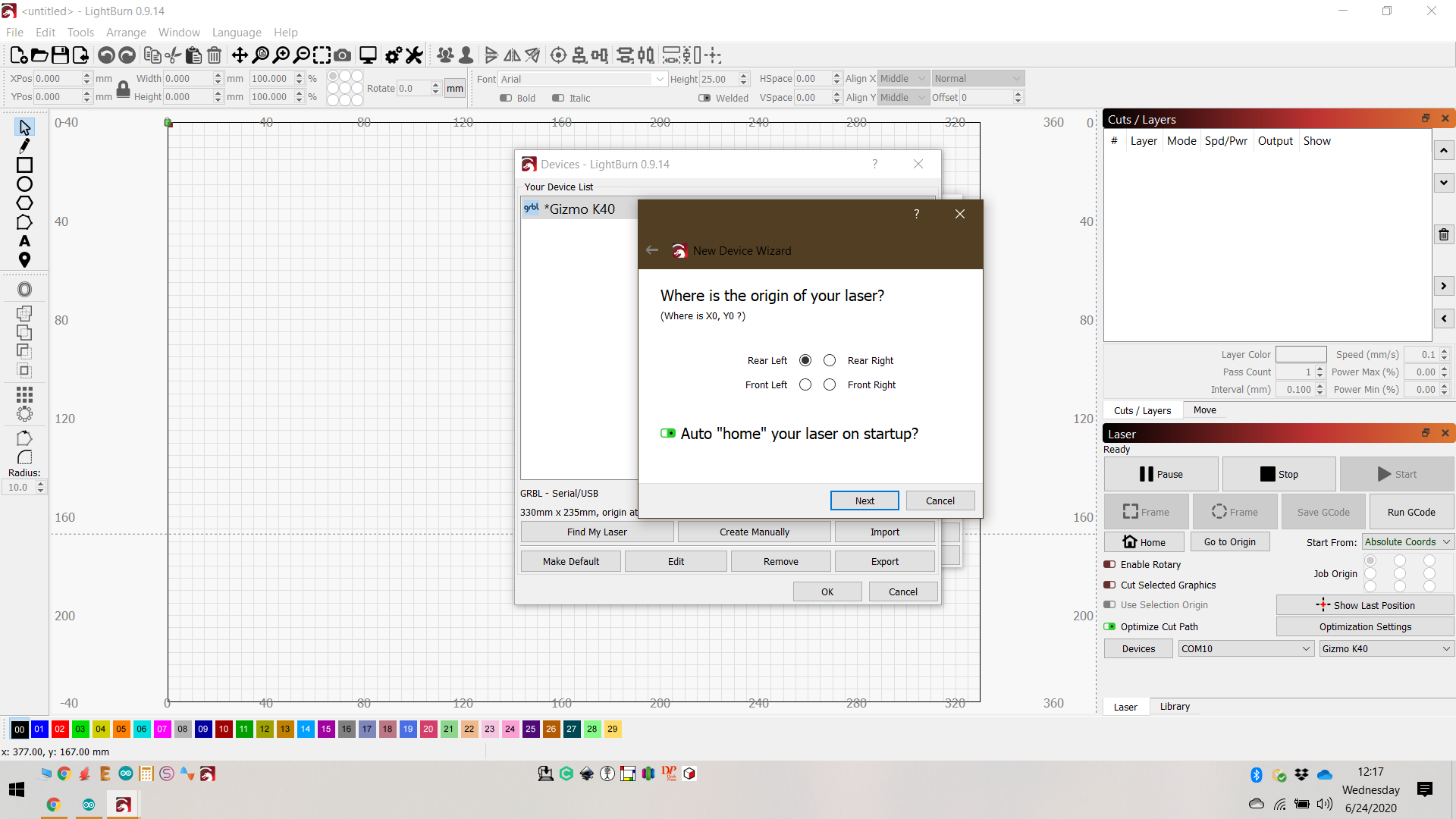
through devices, i have it configured for auto home on startup
the machine does home when click button and goes to origin when clicked
i have G10 for negative space set.
is program/machine actually supposed to auto home when first connected or is it user controlled only?
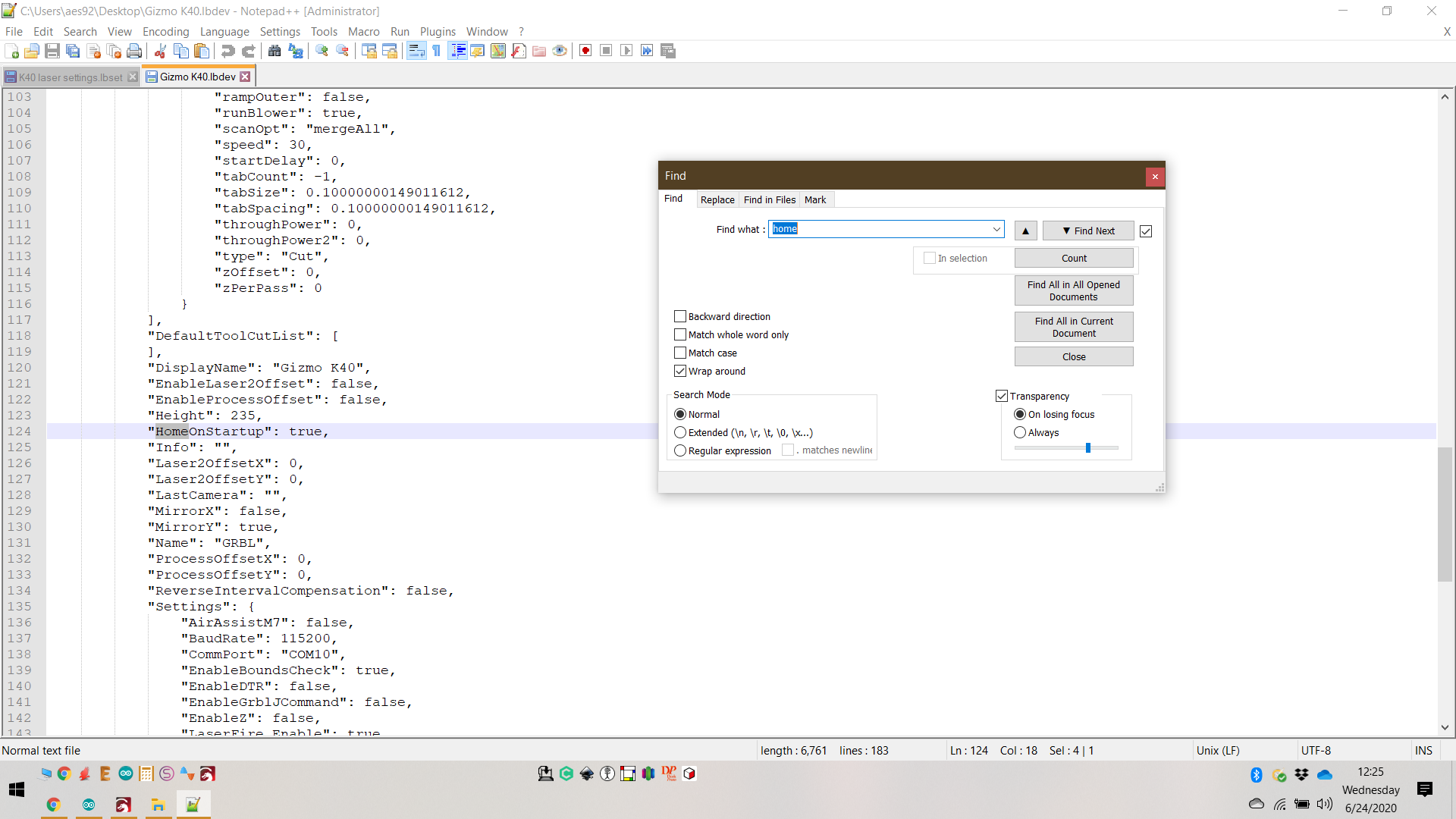
is there a way to have auto home with $Nx or another way.
it gives me errors when i try to assign ($N0=$H).
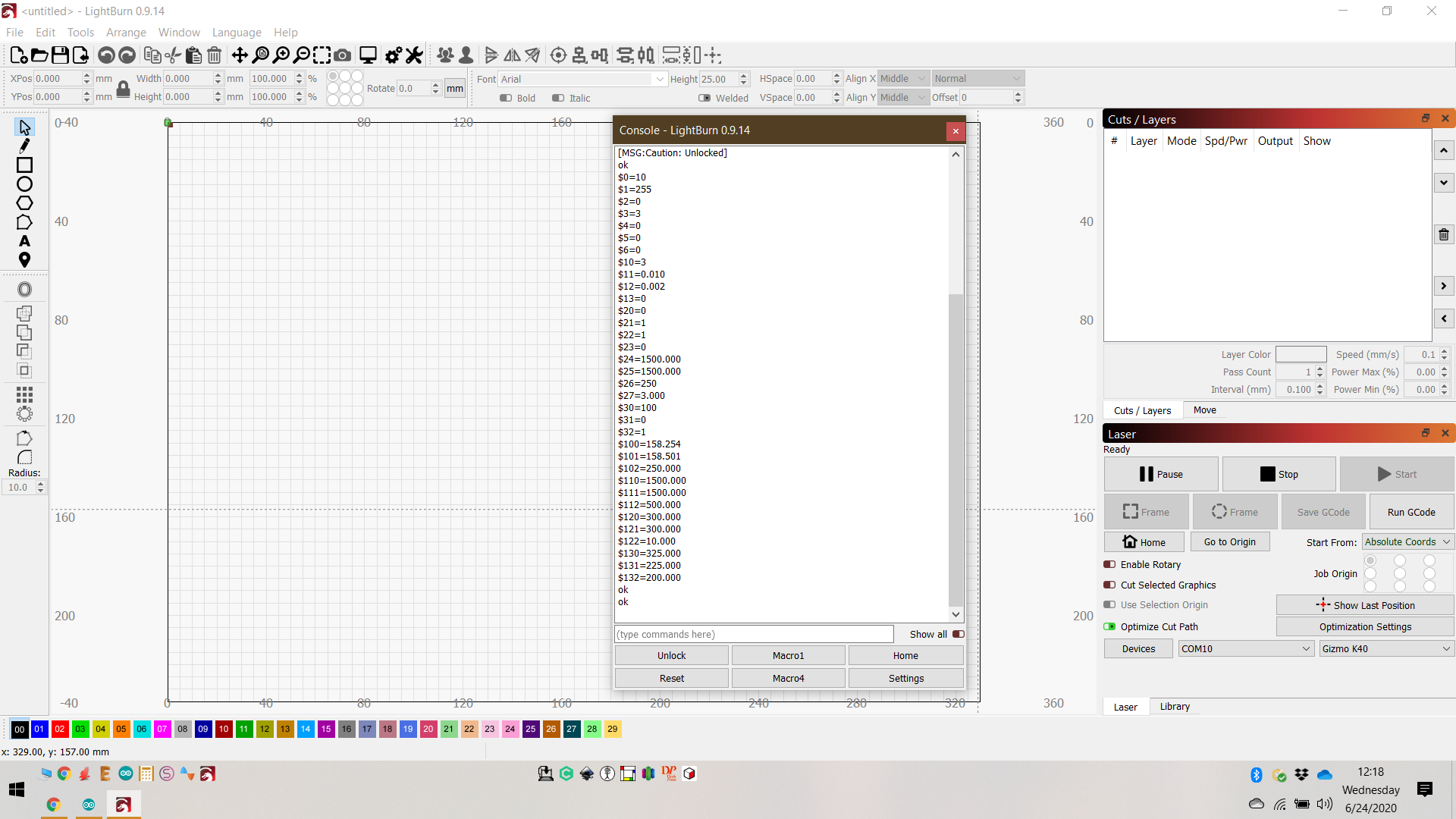
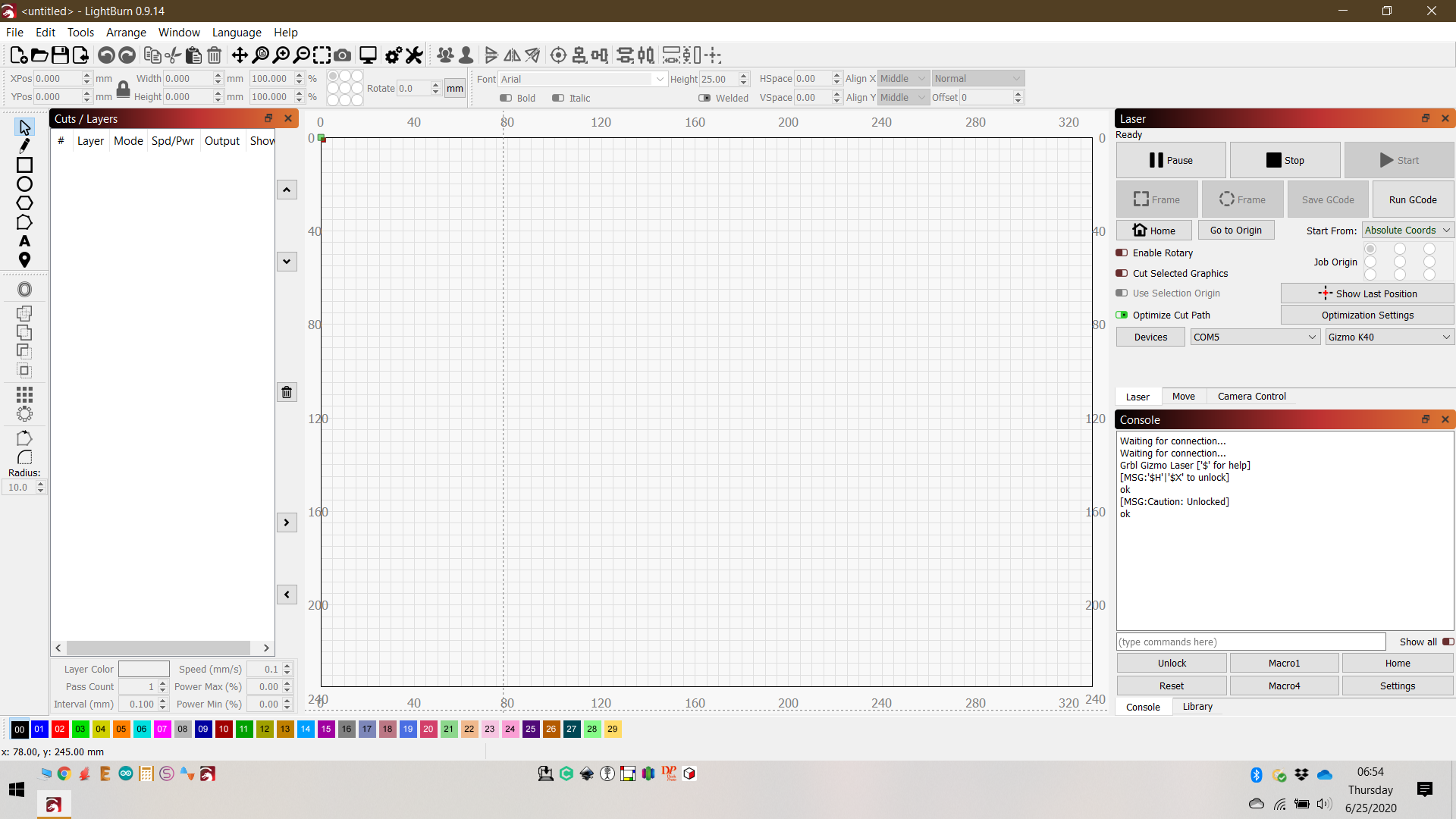
It should trigger the home command when it first connects, yes. Does it not do this? Can you show what the console says when you first connect to the controller?
What the heck is “Grbl Gizmo Laser”? That’s a new one for me. Where did this version of GRBL come from? The maximum speeds are really low for a K40 (1500mm/min) as well.
I would suggest reading up & building (compiling) a build of grbl from scratch and that way you can change the homing routine to suit your machine. the LB build .14 seems to not like grbl settings from the menu & Oz assures me it is fixed in the upcomming .15 build so you need to enter grbl config commands manually in the console window to make them stick.
The best place to learn how to compile your own clean build is over at the grbl github page and that way start with a clean version in arduino and tweak untill you get it working sweet.
Hi there, I use GRBL 1.1h and experience the same issue. Homing works flawlessly when I hit the button or emit $H. But homing at startup does not work. I get the same console output as James posted (except for that “Gizmo”), GRBL gets unlocked, but no homing motion occurs. I compiled GRBL myself.