it is my first post here: I am trying to update a k40 by installing a DLC32 board: I bought one, but it does not seem to work well: the lines are not straight, like if there’s a jitter in the movement (the stock m2nano board works perfectly.. engraving the same image by using the m2baord and k40whisperer yelds perfect results).
I think it is related to the driver current set limits: is there a link to a procedure to measure the Vref parameters for a TMC2209 drivers? Should I do it with the k40 turned on? I read somewhere that turning on the board and not connecting the drivers may lead to drivers damage..
I also have another curiosity: On the console, I get the following message:
What the OPT line means? Does somebody have a link where I can find the meaning of the OPT line? I tried to look on the DLC32 github page, but without success…
I run mine DLC32 on the desk, not in a machine or with driver boards. I ran mine directly to the stepper motor drivers. They are separate in my machine. I’ve never used the boards motor drivers.
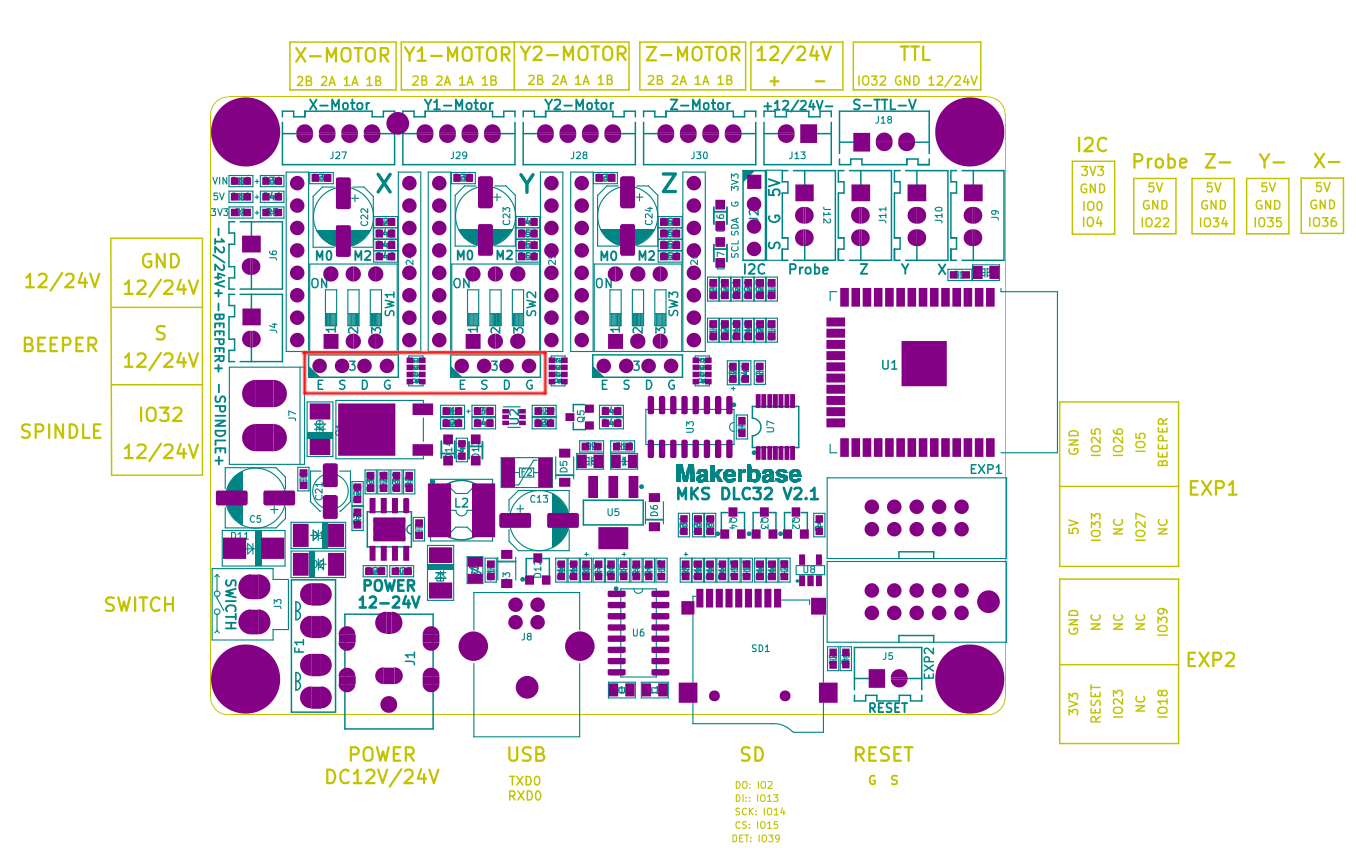
I use the outputs here, in red, for the motor driver.
@misken, do you also have a suggestion to set GRBL values (acceleration) in order to avoid that corners are not engraved in “line” mode? I tried to engrave (or cut) some rectangles in line mode, but it seems in the corners the laser does not fire.. I tried also to set “Constant Power” mode.. in constant power mode, the laser does all the path, but in the corners the laser stays more time, so that the corners look as it they are burned “twice”.. (I don’t remember having this issue when using k40whisperer..)
I think I got those reports a few times. The best solution in this case is to switch to grblHAL as firmware. It takes some fiddling to get it running, but it seems it has the best motion algorithm at the moment.
Since you tested the constant power mode already, I think the only way is testing the acceleration values to check if they enhance the process. You can also try to play with the s-value min, because CO2 lasers usually need a specific amount of power until they fire, in contrast to diodes, which already fire at 0.1%.
Make sure you can restore it back to the original code… along with settings..
There is always the possibility when moving to a new firmware, you might not like it. It’s just good practice to be able to simply put it back, so to speak.
@misken doesn’t some of the newer grbl allow for varying power on a corner?
Yes, most recent versions provide this. But I think using this feature, his laser wasn’t cutting through in the corners. And turning off lead to overburn. So it would need a dynamic power with a minimum power here. But that’s not really available.
I can’t say for sure since I don’t have the m3nano, but I’m convinced that it’s a firmware thing. It depends on how the motion is calculated and how the laser power is controlled. I the moment where the laser takes a sharp turn, it actually stops. If the speed is zero or close to zero, the dynamic power might also send zero power to the laser. But another firmware might take a larger look-ahead-buffer and don’t reduce the power to zero if the next moves have a strong acceleration. Just a guess, it might be different. But the firmware is the main difference here, the software usually only sends a list of lines or curves to the laser. Those should be nearly the same for the same shapes.