Hello
I have already read some other topics about this subject but i can’t find my answer.
I have NEJE Master 2 20W
I don’t know exactly sinds when but i think after one of the patch/update, i get this rare situation.
My problem with LB software:
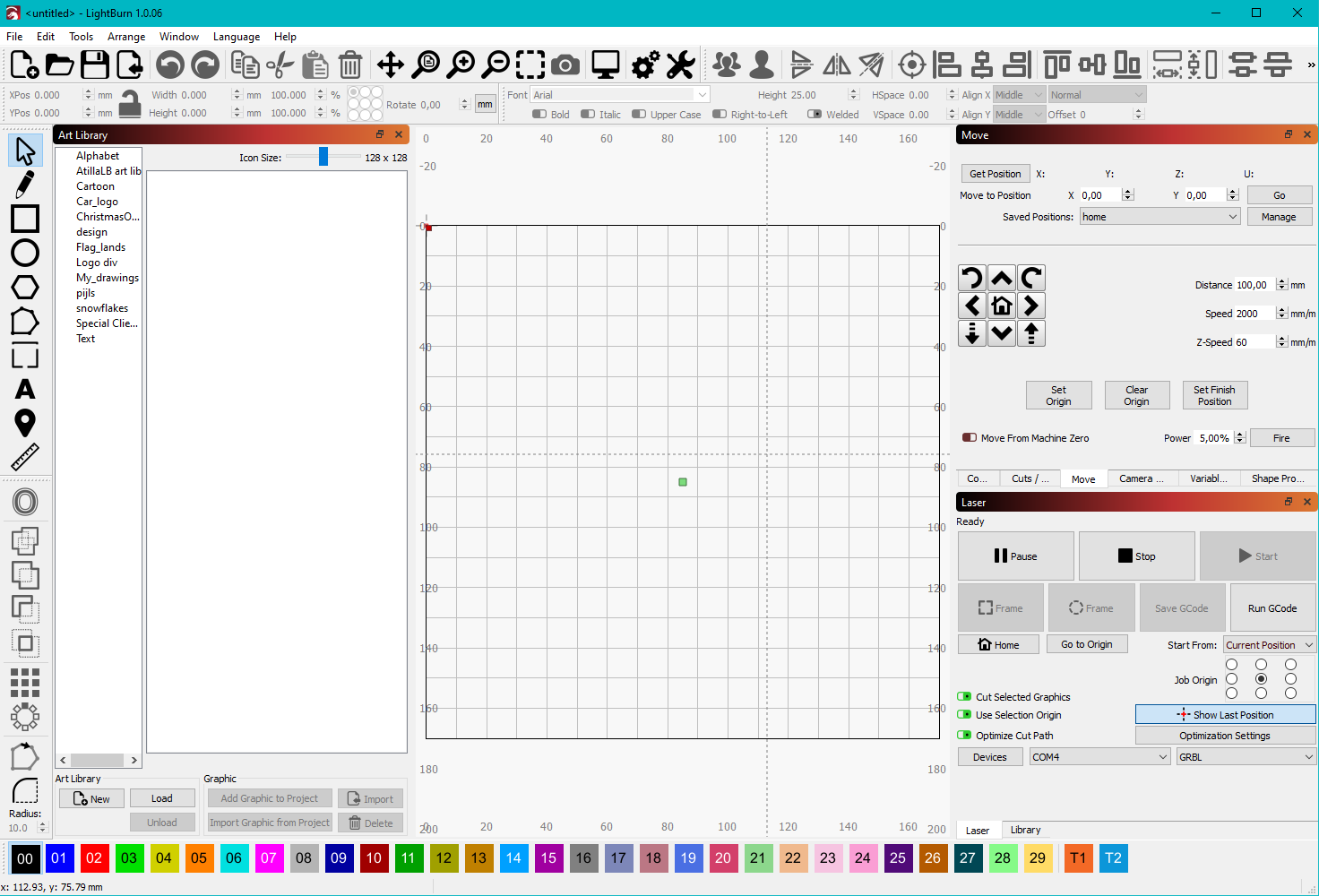
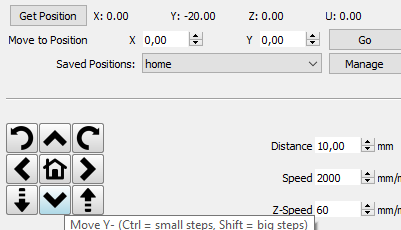
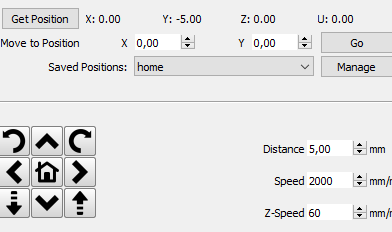
- I click Home button and it goes to end switch’s as i want (OK)
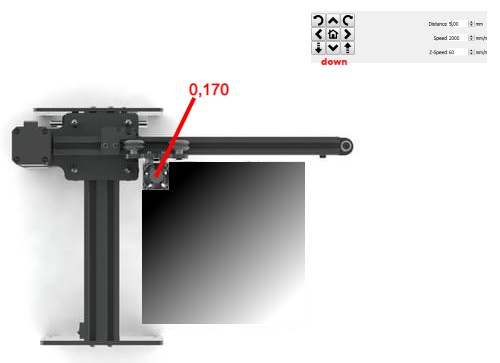
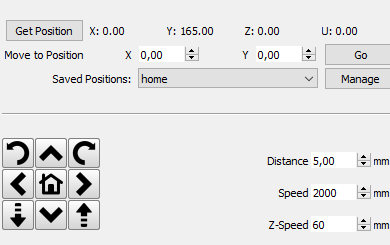
- Then i check position with Get Position button and i see X:0 and Y:170 (this must be 0,0)
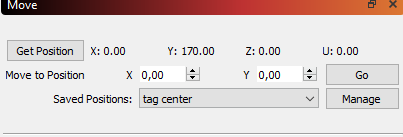
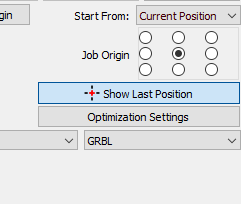
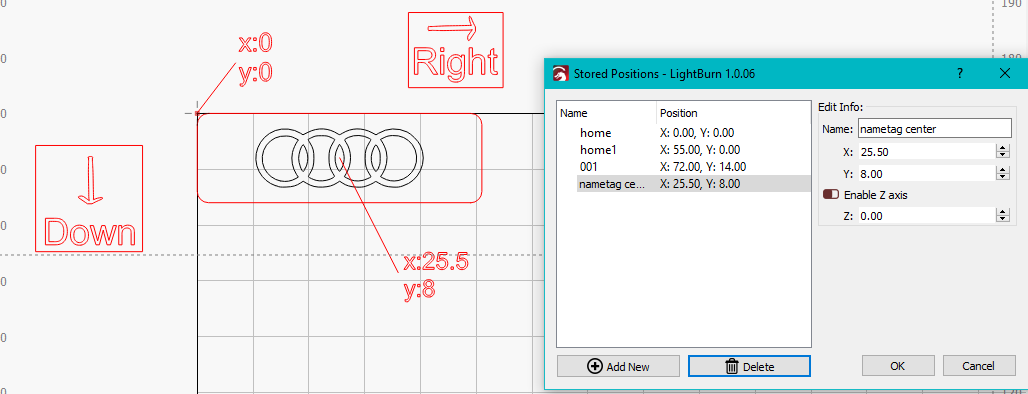
The problems => My old Saved Positions: not working anymore, when i start a job it gives me “almost” always notification “Cut out of bounds….” ,
Further works everything great.
How can i rest the 0,0 position so LB can understand my Home position actually also my 0,0 position is.
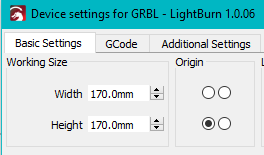
Here is my settings file .lbset
{
“Name”: “GRBL”,
“Settings”: [
{
“Desc”: “Status: Position reporting ($10)”,
“ID”: “0xa0000”,
“Value”: “Machine Position”
},
{
“Desc”: “Status: Show buffer data ($10)”,
“ID”: “0xa0001”,
“Value”: true
},
{
“Desc”: “Junction deviation (mm) ($11)”,
“ID”: “0xb”,
“Value”: 0.009999999776482582
},
{
“Desc”: “Arc tolerance (mm) ($12)”,
“ID”: “0xc”,
“Value”: 0.0020000000949949026
},
{
“Desc”: “Report inches ($13)”,
“ID”: “0xd”,
“Value”: false
},
{
“Desc”: “Soft limits ($20)”,
“ID”: “0x14”,
“Value”: false
},
{
“Desc”: “Hard limits ($21)”,
“ID”: “0x15”,
“Value”: true
},
{
“Desc”: “Homing cycle ($22)”,
“ID”: “0x16”,
“Value”: true
},
{
“Desc”: “Homing feed rate (slow) (mm/min) ($24)”,
“ID”: “0x18”,
“Value”: 25
},
{
“Desc”: “Homing seek rate (fast) (mm/min) ($25)”,
“ID”: “0x19”,
“Value”: 500
},
{
“Desc”: “Homing debounce (ms) ($26)”,
“ID”: “0x1a”,
“Value”: 250
},
{
“Desc”: “Homing pull-off (mm) ($27)”,
“ID”: “0x1b”,
“Value”: 1
},
{
“Desc”: “Max spindle speed (RPM), S-Value max ($30)”,
“ID”: “0x1e”,
“Value”: 255
},
{
“Desc”: “Min spindle speed (RPM), S-Value min ($31)”,
“ID”: “0x1f”,
“Value”: 0
},
{
“Desc”: “Laser mode enable ($32)”,
“ID”: “0x20”,
“Value”: true
},
{
“Desc”: “Step pulse (microseconds) ($0)”,
“ID”: “0x0”,
“Value”: 10
},
{
“Desc”: “Step idle delay (ms) ($1)”,
“ID”: “0x1”,
“Value”: 25
},
{
“Desc”: “Step enable invert ($4)”,
“ID”: “0x4”,
“Value”: false
},
{
“Desc”: “Limit pins invert ($5)”,
“ID”: “0x5”,
“Value”: false
},
{
“Desc”: “Probe pin invert ($6)”,
“ID”: “0x6”,
“Value”: false
},
{
“Desc”: “X Step pin invert ($2)”,
“ID”: “0x20000”,
“Value”: false
},
{
“Desc”: “X Direction pin invert ($3)”,
“ID”: “0x30000”,
“Value”: true
},
{
“Desc”: “X Homing direction invert ($23)”,
“ID”: “0x170000”,
“Value”: true
},
{
“Desc”: “X Steps per mm ($100)”,
“ID”: “0x64”,
“Value”: 80
},
{
“Desc”: “X Max rate (mm/min) ($110)”,
“ID”: “0x6e”,
“Value”: 5000
},
{
“Desc”: “X Accleration (mm/sec^2) ($120)”,
“ID”: “0x78”,
“Value”: 800
},
{
“Desc”: “X Max travel (mm) ($130)”,
“ID”: “0x82”,
“Value”: 170
},
{
“Desc”: “Y Step pin invert ($2)”,
“ID”: “0x20001”,
“Value”: true
},
{
“Desc”: “Y Direction pin invert ($3)”,
“ID”: “0x30001”,
“Value”: false
},
{
“Desc”: “Y Homing direction invert ($23)”,
“ID”: “0x170001”,
“Value”: true
},
{
“Desc”: “Y Steps per mm ($101)”,
“ID”: “0x65”,
“Value”: 80
},
{
“Desc”: “Y Max rate (mm/min) ($111)”,
“ID”: “0x6f”,
“Value”: 5000
},
{
“Desc”: “Y Accleration (mm/sec^2) ($121)”,
“ID”: “0x79”,
“Value”: 800
},
{
“Desc”: “Y Max travel (mm) ($131)”,
“ID”: “0x83”,
“Value”: 170
},
{
“Desc”: “Z Step pin invert ($2)”,
“ID”: “0x20002”,
“Value”: true
},
{
“Desc”: “Z Direction pin invert ($3)”,
“ID”: “0x30002”,
“Value”: true
},
{
“Desc”: “Z Homing direction invert ($23)”,
“ID”: “0x170002”,
“Value”: true
},
{
“Desc”: “Z Steps per mm ($102)”,
“ID”: “0x66”,
“Value”: 80
},
{
“Desc”: “Z Max rate (mm/min) ($112)”,
“ID”: “0x70”,
“Value”: 5000
},
{
“Desc”: “Z Accleration (mm/sec^2) ($122)”,
“ID”: “0x7a”,
“Value”: 5000
},
{
“Desc”: “Z Max travel (mm) ($132)”,
“ID”: “0x84”,
“Value”: 500
},
{
“Desc”: “A Step pin invert ($2)”,
“ID”: “0x20003”,
“Value”: false
},
{
“Desc”: “A Direction pin invert ($3)”,
“ID”: “0x30003”,
“Value”: false
},
{
“Desc”: “A Homing direction invert ($23)”,
“ID”: “0x170003”,
“Value”: true
}
]
}