Ok I’ll do it today. Do you want me to $$ in the 3 modes ?
Funny… on the Ikier website, they sell the K1 by arguing that it can reach 800mm/s (48000mm/min)… and the support confirmed that the fast mode limits the machine to 20’000 …
Any mode is fine. There is no meaningful difference between them for a $$ dump.
Regarding the max speed advert you quote…that supports my “incomplete and misleading” statement.
Y axis runs slower than X due to the extra mass.
My machine shows the following:
Fast mode X Max=50000.000
Fast mode Y Max=20000.000
Fast mode X Accel=4000.000
Fast mode Y Accel=1000.000
Std mode X Max=30000.000
Std mode Y Max=20000.000
Std mode X Accel=2000.000
Std mode Y Accel=1000.000
Fine mode X Max=6000.000
Fine mode Y Max=6000.000
Fine mode X Accel=1000.000
Fine mode Y Accel=500.000
Not that the 50k max matters in the slightest. You’ll never use it…even IF it can get to that before it has to decel for a direction change.
Acceleration, IMO, is far more important than top speed. Poor analogy, but what good is a 300mph race car that takes 20 miles to get there and you only have a 1 mile track?
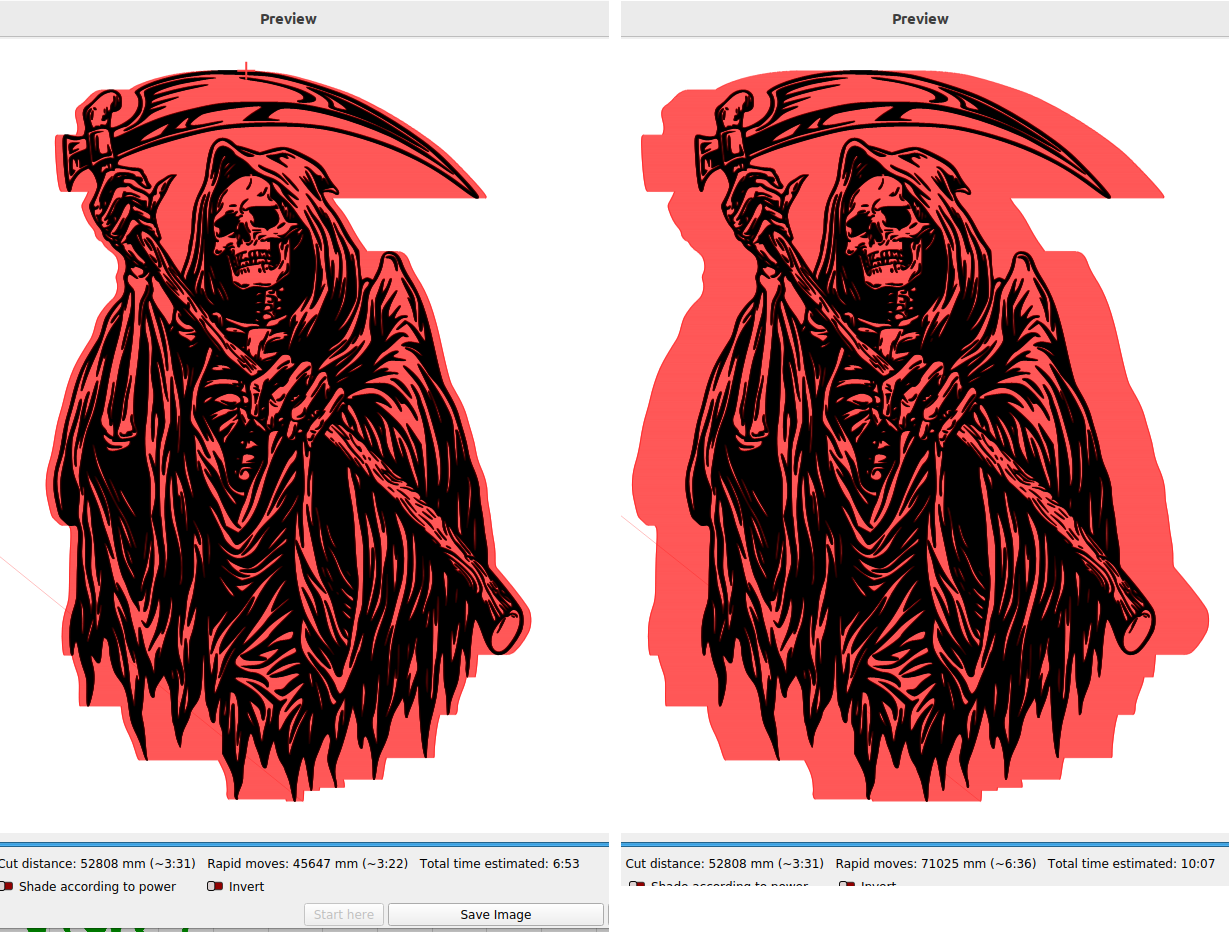
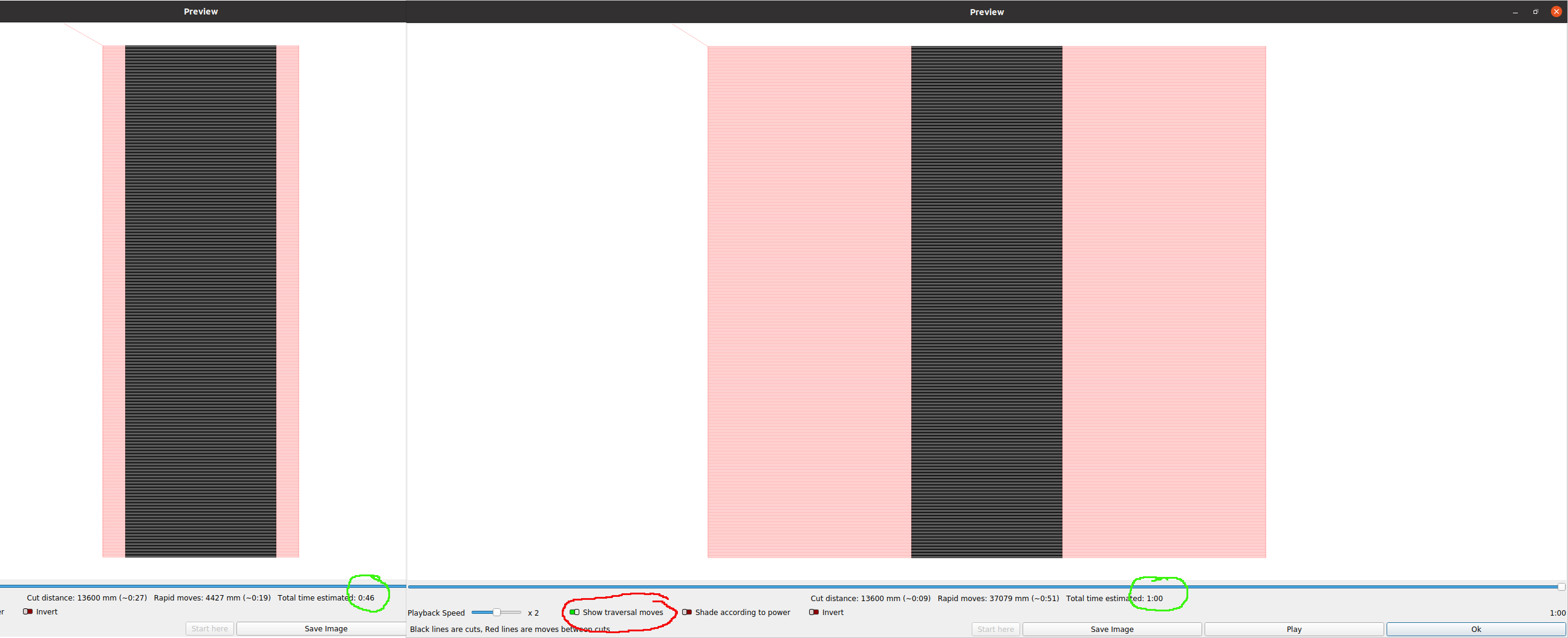
I agree… there are a lot of videos about it… but here is a run with constant scan speed, but 40,000mm/s^2 compared to 6,000mm/s^2 in acceleration values. The red area is the overscan… Also note the time difference.
500mm/s on the left, compared to the right done at 1500mm/s. The right hand one spends less time actually doing work… as is reflected by the elapsed time.
Speeding up the machine by being able to increase acceleration pays off in shorter job times.
Too high acceleration values causes your machine to loose steps and where it’s location. I increased mine by removing mass from the head and removing the drag chain…