I’m also getting Alarm8 on my Snapmaker Ray, 20w.
Does your machine do this:-
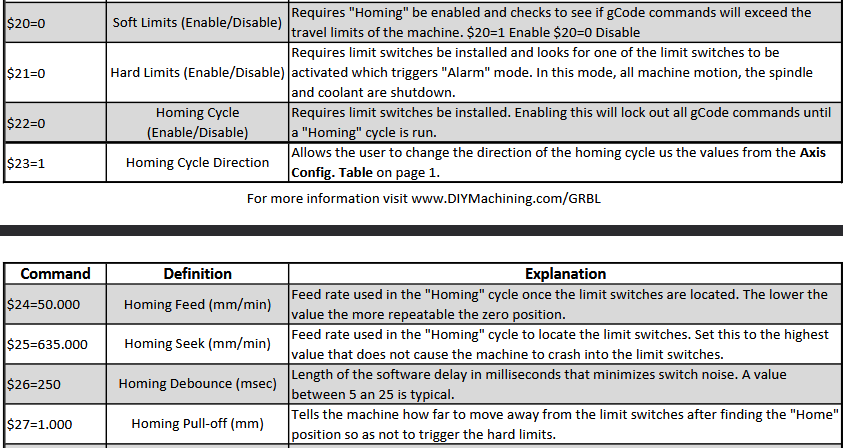
Moves toward Home - Stops in corner - Steps out X 2mm Y 2mm (set by $27=2 also tried 3,4,5 & 10mm) The module does not sit back into the X0-Y0 - Issues Alarm8 and usual msg.
The machine is new and I have put the issue to support…waiting to hear back.
Misken’s comment on $5 was interesting so I did a search…See below.
Also interesting is the bit about Noise.
GRBL Setting $5
In GRBL, setting $5 to 1 inverts the limit pins, meaning the pins are interpreted as triggered when they are high instead of low. This is useful if your limit switches are normally open (NO) and you want to invert their state. By default, the limit pins are held normally-high with the Arduino’s internal pull-up resistor, so setting $5=1 changes this behavior5 [7].
For example, if you have normally open limit switches and you set $5=1, GRBL will interpret the limit switches as triggered when they are not pressed (open circuit). If you set $5=0, GRBL will interpret the limit switches as triggered when they are pressed (closed circuit).5
It’s important to note that if you invert your limit pins, you will need an external pull-down resistor wired into all of the limit pins to prevent overloading the pins with current and potentially damaging them[7].
If you encounter issues with limit switches triggering immediately, it might be due to noise or incorrect wiring. Checking the wiring and ensuring that the switches are correctly configured can help resolve these issues.25
If you set $5 to 1 and still experience issues, it could be due to interference or noise in the system, which might require additional shielding or isolation of the limit switches.2
Setting $5 to 0 makes GRBL think the switches are triggered when you run a homing cycle, which can cause the machine to stop and produce an alarm if the switches are not properly configured.5
For troubleshooting, it’s recommended to check the debounce timing ($and ensure that the homing feed rate ($24) and homing seek rate ($25) are high enough to prevent the steppers from stalling.