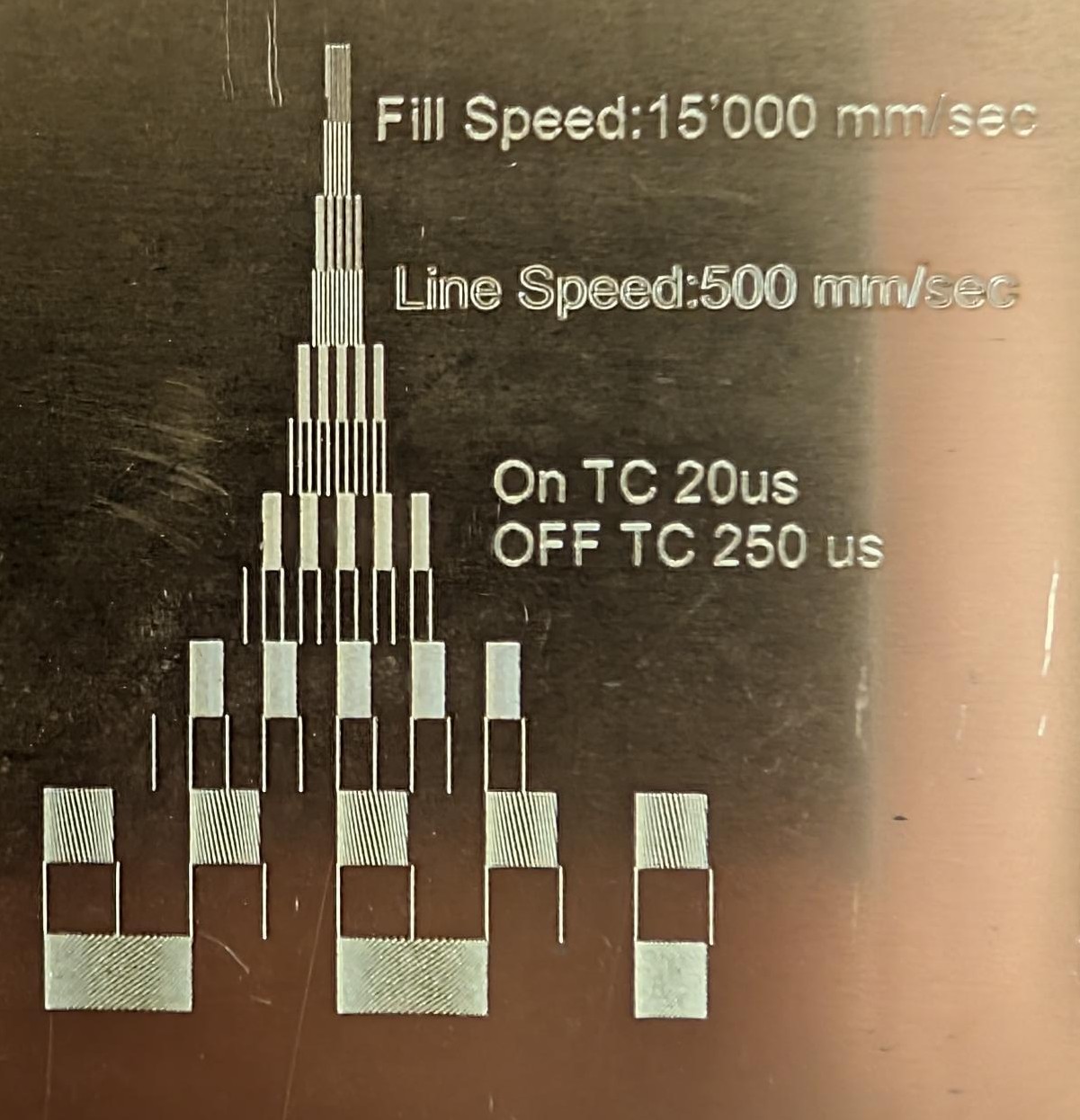
I wasn’t trying to show off the speed of my Galvo (a Gweike G2 Pro), but rather emphasize my assumptions that ideal timing settings are depending on the used speed. While 15’000mm/s is the advertised maximum speed, I agree it performs better with lower speeds.
I calibrated my timings for 4000mm/s with the instructions in this video from MakrTheory
Whenever the laser engraves a line, this happens:
The laser and the mirrors both get the signal to start simultaneously. But the laser waits to turn on for the amount of μs defined in the Laser ON Delay. (This value can be negative if the Laser takes some time to “warm up”)
When the galvo motors tell the controller that they have reached the target (they haven’t physically), the laser gets the impulse to turn off, but waits for the Laser Off Delay. (The Laser OFF TC can’t be negative because there’s no need to turn off the laser, before the mirrors have reached the target)
I have the following assumption: The controller believes, the galvos have reached the target based on timing, not position feedback - so in reality, the mirrors are still catching up.
Now, for the Laser ON TC, we agree that it’s easy to grasp why you see a gap in the beginning at higher speeds: If the laser waits the same amount of time and the galvos move faster, they covered a longer distance before the laser turns on.
For the Laser OFF TC I find it confusing, too. This is my take on it:
At higher speeds, the galvos reach the “theoretical end” sooner. If it uses the default Laser OFF TC, the laser shuts off while the mirrors are still in motion.
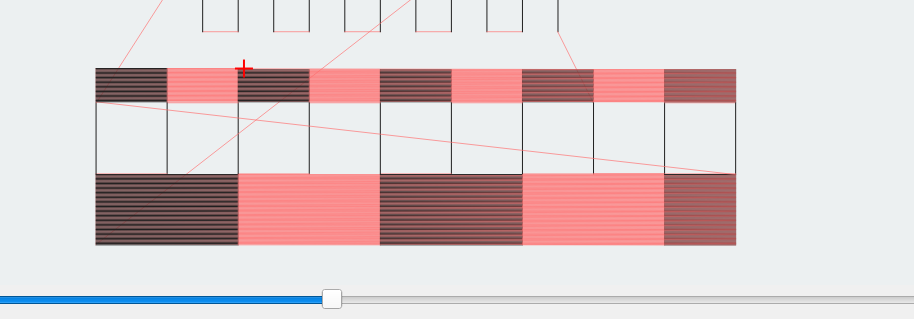
Here’s another test, all at 4000mm/s with the optimal Laser On TC, changing only the OFF TC:
50μs is not enough delay ¦ 200μs is optimal ¦ at far too high 3000μs, there’s a strong burn-in at the end.

I ran your test file again with the crazy max speed but lowered the L On and increased L Off TC. Now, the vertical lines meet at the corners, even at 15k:
Yes. That’s important for this test.
I can’t comment on the MOPA specific settings like Open MO Delay, Q-Pulse Width or even frequency cut-offs, and must say, I’m happy I don’t have these additional variables on my machine for the moment ![]()
I’d be curious to see how your system behaves under similar conditions and if you have an example where Overscan on a galvo would make a real difference that can’t be handled with timing settings - I’d be genuinely curious to see examples. Especially since I’m not aware of any software that does this.
Feel free to share your results!