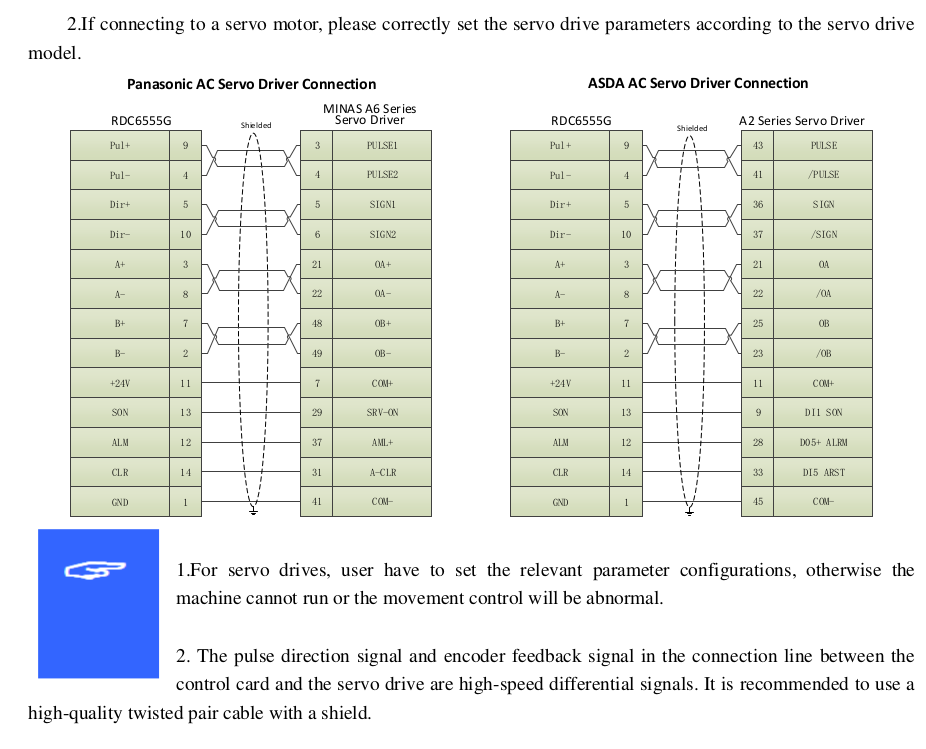
I am new here and asking myself if there is a possibility to run servo motors with ruida controllers? I didn’t found anything about it as most controllers lack x- and y-encorder inputs (each with 6 pins).
The only ruida controller seeming to have encoder inputs is rcd6555 about which, nothing is written in this forum.
My current controller is a leetro mpc6575 and I would like to switch to a ruida controller to use lightburn.
Add to that, these hobby lasers are lucky to include a Z axes, at most these would need a 3 axes controller. A Ruida 6442 or 6445 is < $500 US.
The 6555g can control 5 axes and is about $1200 US, so you won’t find them on a lot of hobby 2d type machines using these.
There are open loop motors, but there seems to be issues with some of them because of delay times…
My guess is you’d have to find a stepper motor driver type interface to your servos… I’ve never seen one, but really haven’t looked. The signals are not really different than a regular stepper…
I have a Leetro mpc6575 controller with Panasonic MINAS A5 series servo drivers. Wiring of their X4 Port (Connection to host controller) looks the same as in the rdc6555 manual.
Would be nice to know if anybody managed to run LB with the rdc6555
So it should work with regular stepper motors and drivers.
It should work, but I can’t say what will happen if you wish to use another axes. Some of these controllers are specific for certain types of operations…
I’d think, unless you need five axes or want to keep the servos, it might be a lot lower cost to replace the motors and drivers for a more standard system. It could be supported by something like a 6442 or 6445 type Ruida… at much lower cost…
There has got to be some relationship between turning the motor and it’s ratio to movement of the head… Not matter what kind of system you have, these have got to be figured out for this to work…
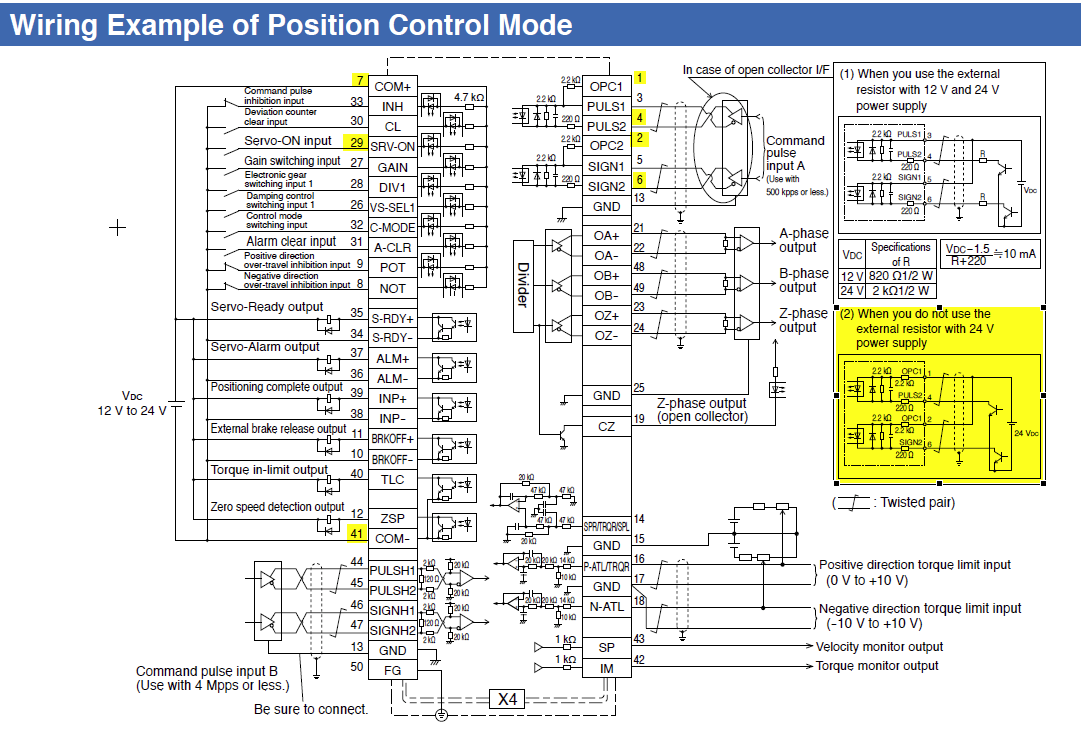
If you look at the wiring to the servos in the manual, these servos use steps with the control signals…
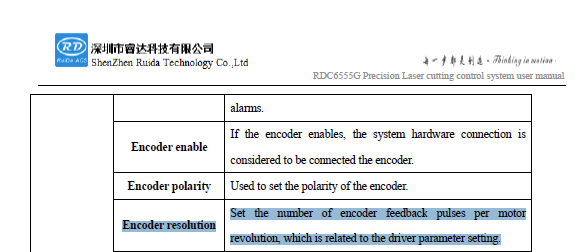
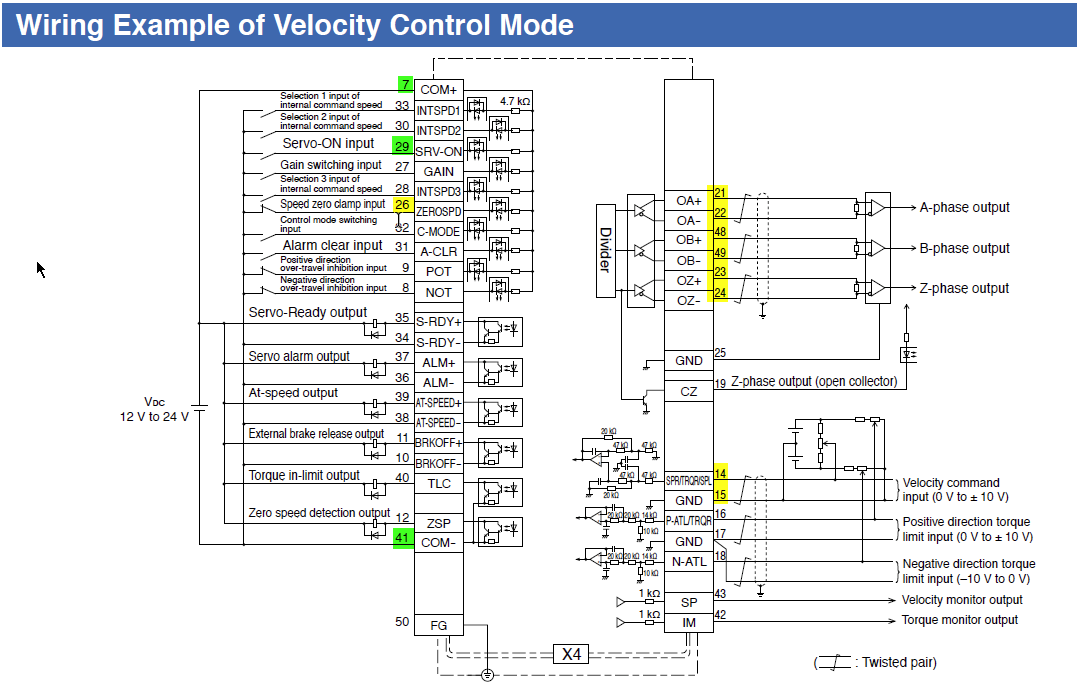
after a while looking to the MINAS A5 docs I found out that this drivers can run in different controll modes. The controll mode with this leetro board is velocity control. Wiring looks like this: