$#
[G54:-602.000,-602.000,0.000]
[G55:0.000,0.000,0.000]
[G56:0.000,0.000,0.000]
[G57:0.000,0.000,0.000]
[G58:0.000,0.000,0.000]
[G59:0.000,0.000,0.000]
[G28:0.000,0.000,0.000]
[G30:0.000,0.000,0.000]
[G92:0.000,0.000,0.000]
[TLO:0.000]
[PRB:0.000,0.000,0.000:0]
ok
[VER:1.1h.20190825:]
[OPT:V,15,128]
Target buffer size found
$$
$0=10
$1=25
$2=0
$3=0
$4=0
$5=0
$6=0
$10=0
$11=0.010
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=0
$24=25.000
$25=500.000
$26=250
$27=3.000
$30=255
$31=0
$32=1
$100=160.000
$101=160.000
$102=160.000
$110=8000.000
$111=8000.000
$112=8000.000
$120=300.000
$121=300.000
$122=300.000
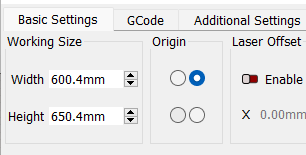
$130=600.000
$131=600.000
$132=110.000
Home RR= <Idle|WPos:599.000,599.000,-3.000|FS:0,0|WCO:-602.000,-602.000,0.000>
Rt Frt= <Idle|WPos:599.000,-58.237,-3.000|FS:0,0|WCO:-602.000,-602.000,0.000>
Lt Frt= <Idle|WPos:1.775,-58.237,-3.000|FS:0,0|WCO:-602.000,-602.000,0.000>
LT RR= <Idle|WPos:1.775,601.369,-3.000|FS:0,0|WCO:-602.000,-602.000,0.000>
ok this is what I got