If you want it to halt, an active high would pause it. Since it’s a wired or, anything on that line can pull it low, meaning nothing else should be attempting pull it high.
If the servo has an error, there is no handling of that via the Ruida, unless you want it to pause. The training that I got on servos (which was limited) would correct themselves unless it was a major failure.
If it fails then what?
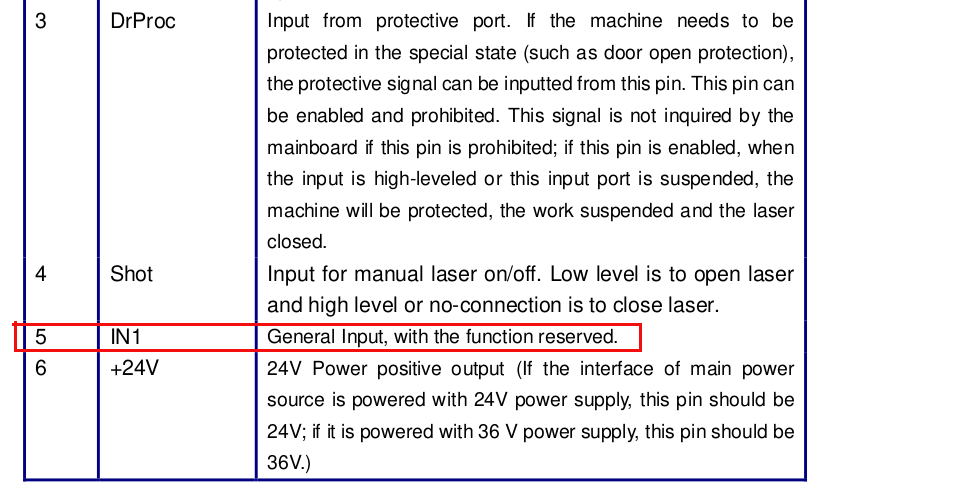
I don’t know what IN1 is configured for or does. Here is the manual page.
They have similar comments on Out1 and Out2.
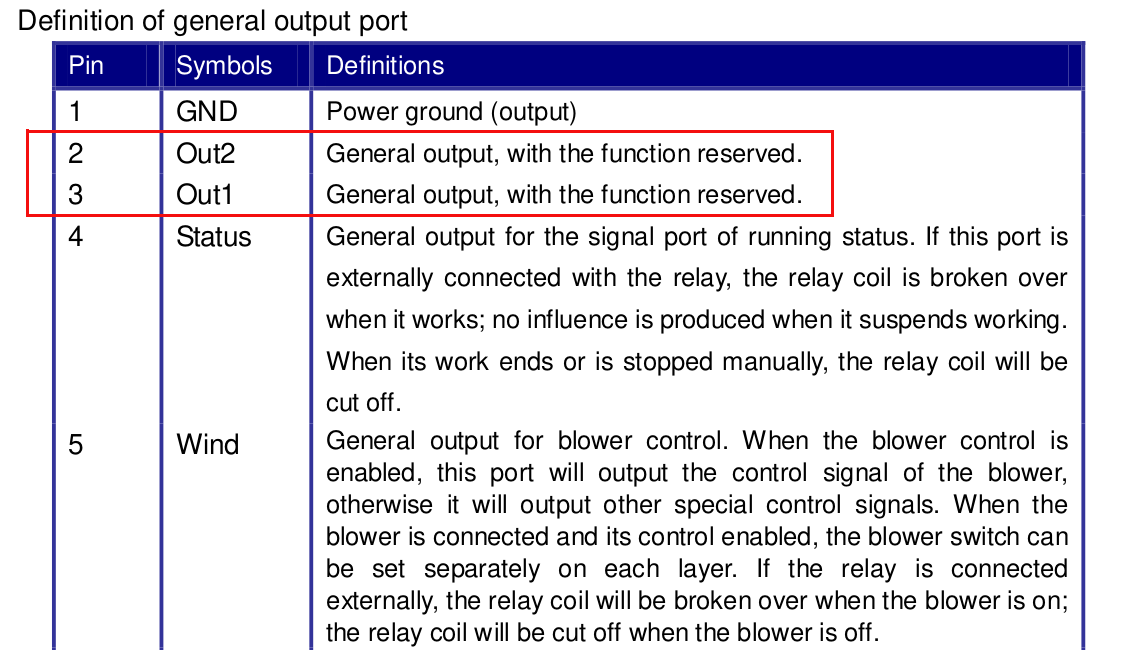
These are commonly used for a stack light to indicate machine state.
![]()