Hello,
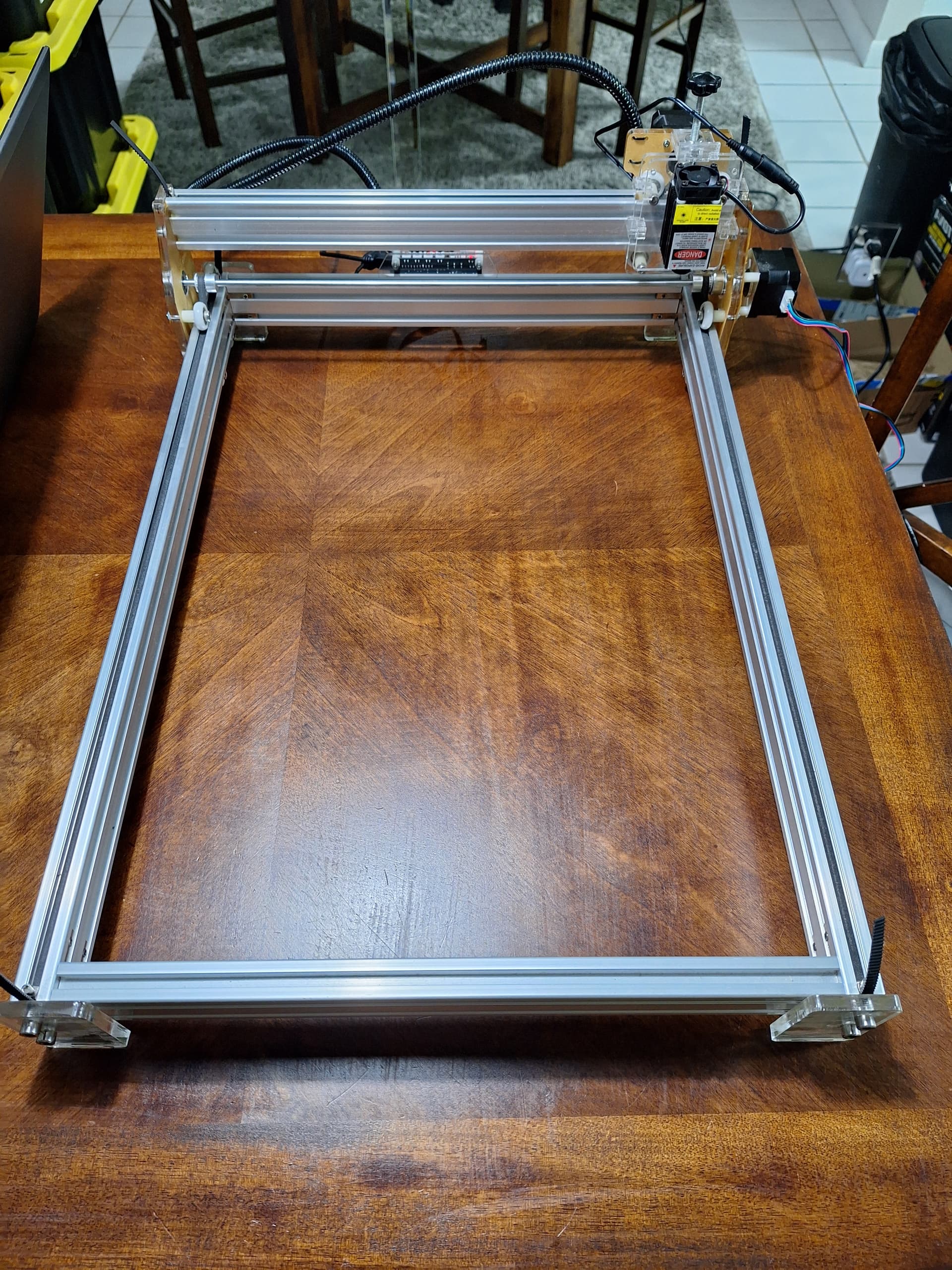
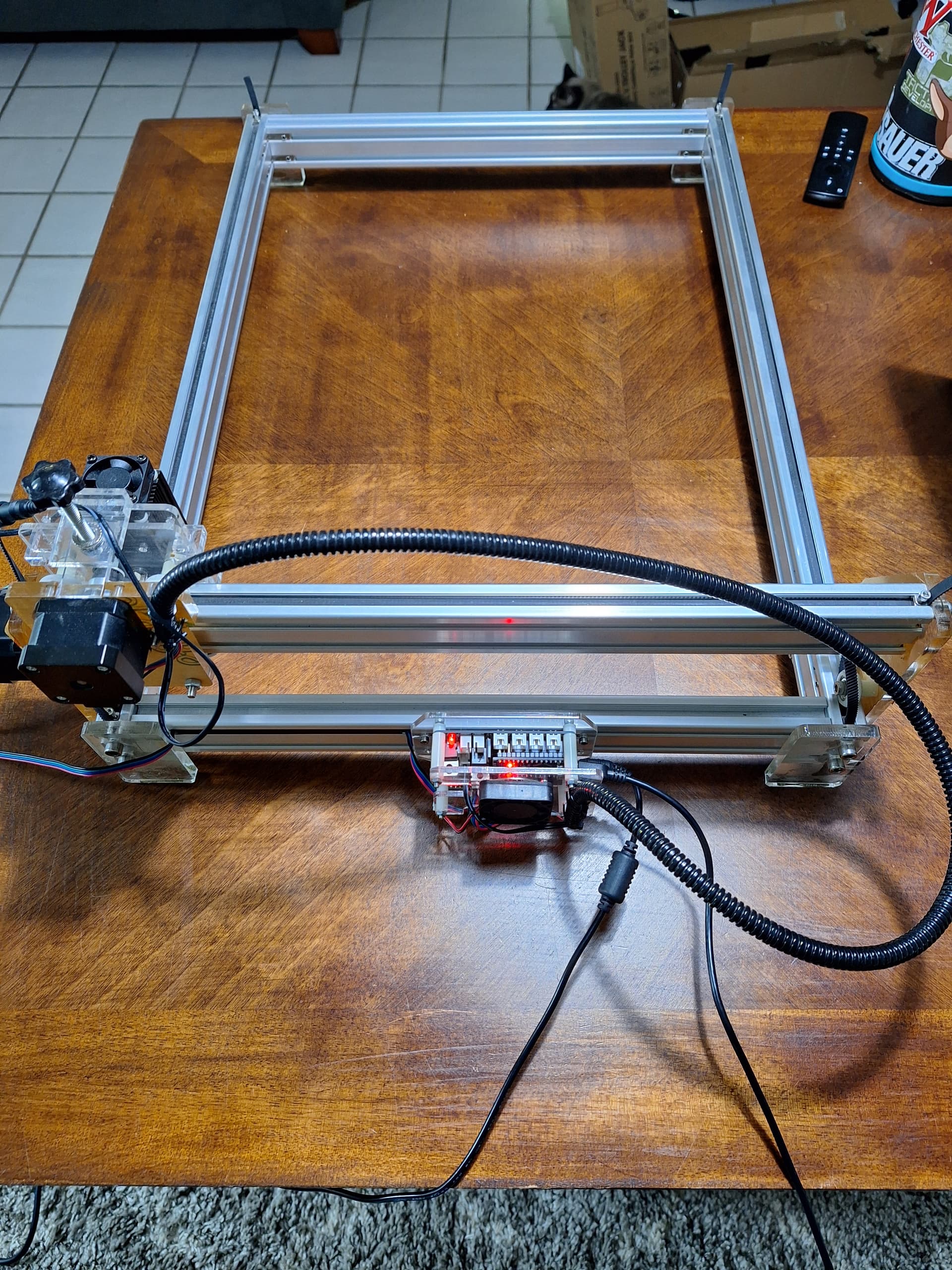
New to the forum and to laser engraving overall. I got my hands on a 2 axis laser engraving setup that was getting tossed. I believe it’s an Eleksmaker A3 (or a clone). It was working fine and I have done quite a few things on it so far with no issues. Please excuse my terrible lingo as I am learning how all this stuff works as I go. The main controller board is a Laseraxe CNCC mini and it has an Arduino Nano microcontroller on it. I am using software called EleksCAM. I also have a trial of Lightburn but the issue persists with that as well.
The issue I am having now is with the stepper motor(s). When I manually adjust the location of the laser in EleksCAM, the X and Y axes are reversed from what they were before. In addition, if I try to move along the X axis it doesn’t move but I do hear some sounds like the stepper motor is trying. When I adjust the location along the Y axis, if I press the up arrow or down arrow it only goes in one direction. Basically, it’s only moving in one direction no matter what I do.
I swapped the stepper motor cables on the board to verify they were good. When I did that, the X axis motor worked fine, but the issue changes to where it only moves one direction on the X axis rather than Y.
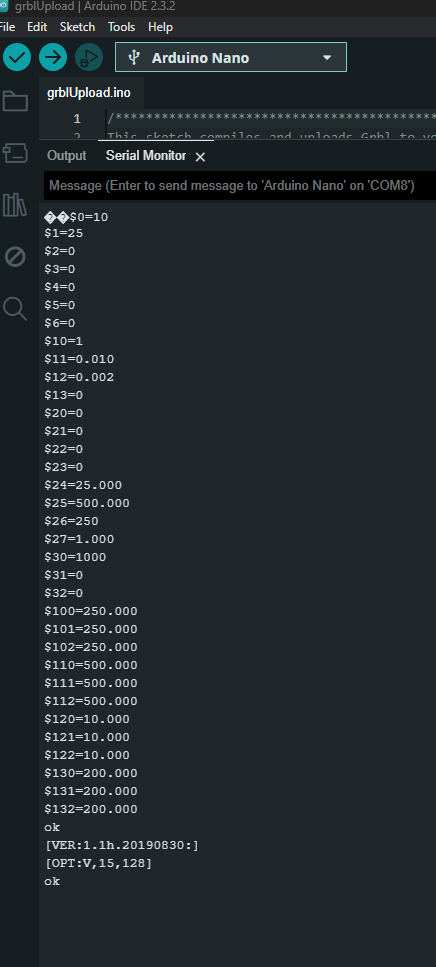
I was able to successfully flash the Arduino Nano with GRBL [VER:1.1h.20190830:] using Arduino IDE. I can communicate with the Nano and attached a screenshot of the current settings and version. I’m not sure if or how I can upgrade the FW on the Laseraxe board or if that is even the cause.
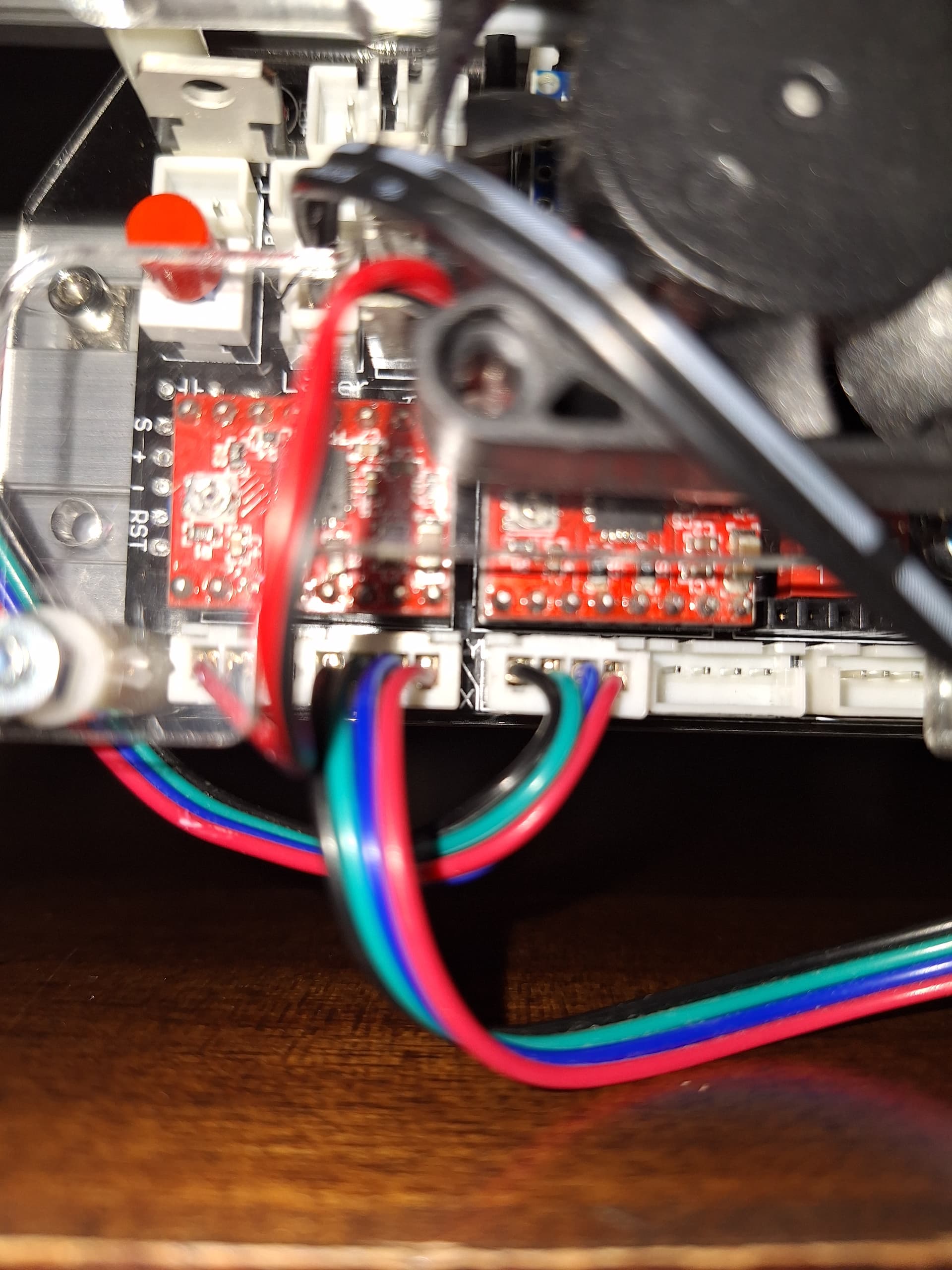
I did some testing with my MM, swapped the stepper motor drivers, swapped the motor cables, no change to the issue. It seems like the X axis stepper motor is having power applied to both directions so it doesn’t move. I ordered a replacement board since they are cheap and we’ll see if that fixes in it a couple weeks. I’m familiar with soldering on boards but not sure what components to test. I’m going to keep tinkering with this board, though.
Thanks.