Hello,
I just started using Lightburn for my new laser cutter. And I am having problems from the beginning in spite of following a tutorial course to be able to understand this better.
Just by starting I have encountered the problem:
ALARM:8
Homing fail. Cycle failed to clear limit switch when pulling off. Try increasing pull-off setting or check wiring.
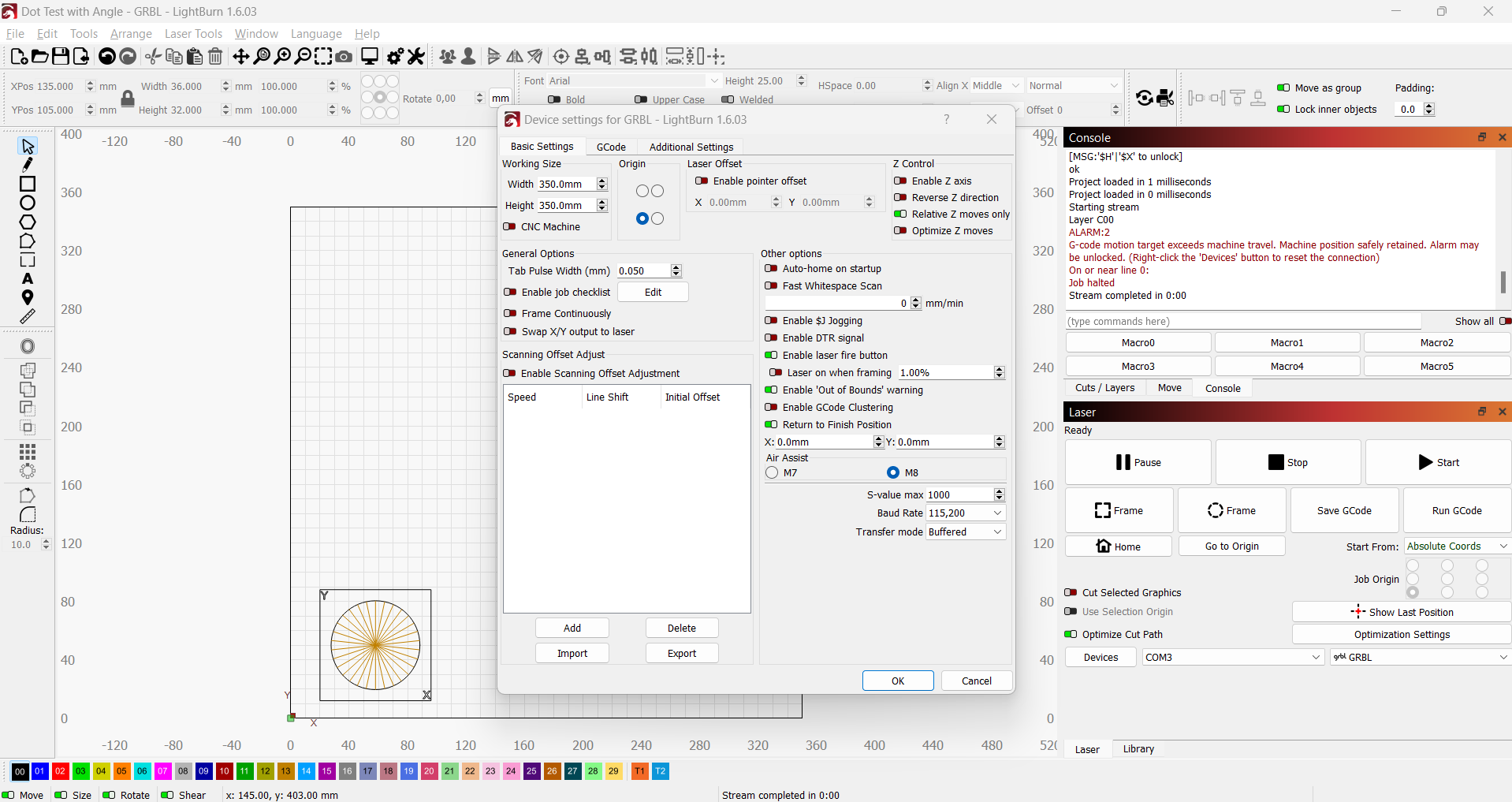
I have also suffered the “G-code motion target exceeds machine travel. Machine position safely retained. Alarm may be unlocked. (Right-click the ‘Devices’ button to reset the connection)” alarm
and the 9 “G-code locked out during alarm or jog state.” alarm.
I don’t know what to do to be able to start using this tool. Any help will be greatful
Thank you in advance
Hello, thank you for your response.
I don’t know how to check it, but when I started it for the first time the error didn’t come out, and after the laser “crashed” with the edges it started to come out the problem “Homing fail. Cycle failed to clear limit switch when pulling off”.
And since that moment the alarm “G-code motion target exceeds machine travel. Machine position safely retained.” appears and the laser does not move anymore.
Questions
a) does your laser have limit switches?
b) the Alarm 2 derives from the machine thinking is in negative coordinates - becuase of the homing fail.
I have deactivated the $22 but the machine does not move to the front left side (if I try to move it I get the same error as before when trying to move). I have turned off the laser and moved it manually and when I turn it on again I get the error 5 “Homing cycle is not enabled in your Grbl settings”.
I have already done what you have indicated, alert 8 no longer appears but I still can’t move it, I keep getting this:
Starting stream
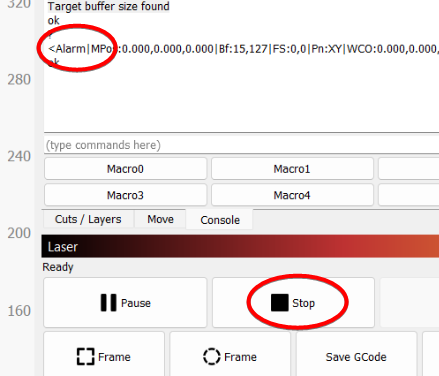
ALARM:2
G-code motion target exceeds machine travel. Machine position safely retained. Alarm may be unlocked. (Right-click the ‘Devices’ button to reset the connection)
@gilaraujo is right - there are some strange values in your configuration. Do you have a standard S9 laser? No upgrades? Then first, try to send $RST=* in the console window and then do the $$ command again and post the output here. To check if those values are corrected.
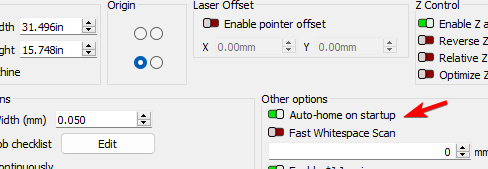
Next, regarding homing, as Gil already explained, you can’t do that automatically. You need to manually position the laser at the front left BEFORE turning it on and connecting the USB cable. Then the laser will have its zero position at that location.
Here is a guide on how you can work with positioning: Coordinate systems & workpiece alignment - Diode Laser Wiki and which software options to set: Setting up the software - Diode Laser Wiki
You can’t / shouldn’t use “absolute positioning”, because the laser has no reference position. Just use “current position” as starting position, then the laser should work normally.
Ok, so I put the laser in the front left position (touching the edge of the machine I imagine although my honeycomb is smaller than the size of the machine) and work with current position and it will always start from where it is. right?