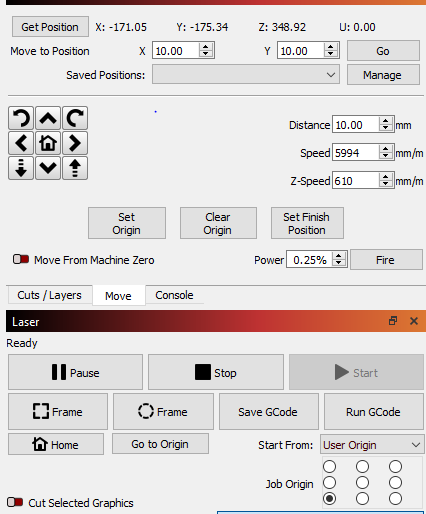
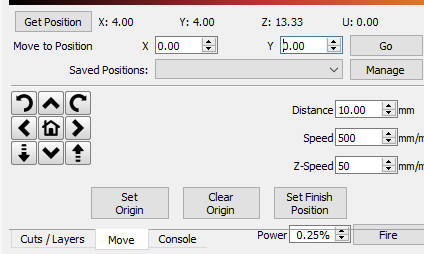
The $100 and $101 are = to 199.100. This is what is in the console. The last time I was able to move my laser I moved it to the left front corner of my board. I tried to set an offset for my workspace by putting in this G10 L2 P1 -584 -584 I used 584 because I have a honeycomb grid and that is the measurement for it. Maybe this is where I messed up? Any way when I hit the X direction(the one to the right of the home) the value at the top says -171.05 the Y value is -175.34 and the Z is 348.96
Waiting for connection…
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
error:9
G-code locked out during alarm or jog state.
[MSG:Caution: Unlocked]
ok
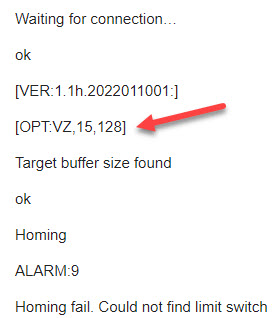
[VER:1.1g.20181112:LEADMACHINE1010LASER]
[OPT:V,15,128]
Target buffer size found
ok
Waiting for connection…
Waiting for connection…
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
error:9
G-code locked out during alarm or jog state.
[MSG:Caution: Unlocked]
ok
[VER:1.1g.20181112:LEADMACHINE1010LASER]
[OPT:V,15,128]
Target buffer size found
ok
<Idle|WPos:-271.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-271.050,-165.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-271.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-261.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-251.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
Starting stream
[MSG:Pgm End]
Stream completed in 0:04
ok
ok
ok
ok
ok
$$
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
ok
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=0
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
$H
ALARM:9
Homing fail. Could not find limit switch within search distance. Defined as 1.5 * max_travel on search and 5 * pulloff on locate phases.
ok
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
[MSG:Caution: Unlocked]
ok
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=0
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
Waiting for connection…
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
error:9
G-code locked out during alarm or jog state.
[MSG:Caution: Unlocked]
ok
[VER:1.1g.20181112:LEADMACHINE1010LASER]
[OPT:V,15,128]
Target buffer size found
ok
$0=10
$1=255
$2=0
$3=4
$4=1
$5=0
$6=0
$10=0
$11=0.020
$12=0.002
$13=0
$20=0
$21=0
$22=1
$23=3
$24=100.000
$25=1000.000
$26=250
$27=5.000
$30=1000
$31=0
$32=1
$100=199.100
$101=199.100
$102=199.100
$110=4000.000
$111=4000.000
$112=4000.000
$120=700.000
$121=700.000
$122=700.000
$130=810.000
$131=730.000
$132=90.000
ok
<Idle|WPos:-271.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-261.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-251.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-241.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-231.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-221.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-211.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-201.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-191.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00
<Idle|WPos:-181.050,-175.344,348.925|FS:0,0|WCO:271.050,175.344,-348.925>
ok
Starting stream
[MSG:Pgm End]
Stream completed in 0:00