OK, first Ruida I installed had a bad input on YLIMIT+, it couldn’t read it, I didn’t know I was wasting my time trying to fix it by configuration.
The second Ruida 6445G has a working input. I finally got it to home, however, it weirdly only worked when I took the Y home sensor, located on the far side, and plugged it into YLIMIT-. Then you asked “is Y increasing or decreasing?”
And it was decreasing moving further away, so I see I had it ALL flipped around. It was using YLIMIT- because it was trying to home to the front of the machine (unusual and not suitable for me), but also the motor direction and keypad got flipped in a way where the features seem to work because there’s two things set wrong on each one. e.g. the keypad is inverted, but then the motor direction is also inverted, so YUP still makes it go away from you as desired, but Y decrements showing it’s actually not correct.
You’d think “OK just move to YLIMIT+ and fix the dir polarity and keying direction ya big dummy” but I couldn’t get it going the right direction and homing on YLIMIT+ and the YUP moving away and incrementing Y.
And, like, there’s only 4 iterations there, right? Seems like nothing worked. Then I found “Machine Config”-> “Y home” and tried “above”. Which, well, seems to literally promise it’s going to change the homing direction. But it’s weird that it’s not in the Y axis config, nor did I see an equivalent for changing “X home”- which is weird, because it’s totally valid for someone to want to put the x home switch on the right and home that direction.
My interp was:
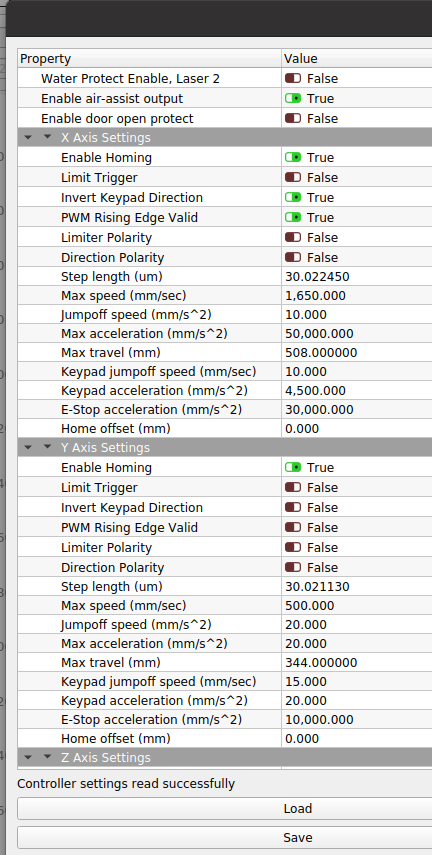
“dir polarity” just flat out inverts the direction at the pin. It doesn’t know if that means up or down, it’s just inverting it.
“keying direction” changed whether YUP key makes the Y axis increment or decrement, which would also change the direction the gantry goes. We want YUP to increment Y and make the gantry go away from you.
“Lmt polarity” would be whether it considers a “tripped” to be on a high or low level at the pin. We have common NPN NO inductive prox switches, it pulls low when tripped. And I’m very sure that the switch is correct.
“Machine Config->Y Home”, “above” should home by going Y+ and look for YLIMIY+ to trip, “below” would go Y- and look for YLIMIT- pin to trip.
But something’s not right. I tried this for a long time and it’s just crazy I can’t get this to work.