Thought I’d share my build process for others to learn and benefit from in the future.
Also I have a few questions still that I need to sort out.
This is a continuation of my post from a year ago here:
I’d started but got busy and then sick with Covid, life and work stuff. So here we are a year later… Finally got the parts and time to begin.
I’ve recorded a video of the factory wiring before I begin so I have a record of it for future reference. I’m not an electrician as you’ll see from watching the video. But it may be helpful for others to see it as a reference in the future for their Chinese C02 laser electrical factory wiring.
My machine has manual Z height buttons with a regular electric motor. 3 wires. So this might be good for others wanting to know how to wire one up if you prefer it to be separate from the Ruida controller.
First video is 15 minutes showing the entire walk through of the electrical signal flow from the wall to each component. Shorter videos after were recorded on the fly while I was figuring things out. So not all info is accurate. The 15 minute one was my do over once I understood things much better.
Oops. Here’s the link to my first post from last year where I’d originally started all this: Upgrading to a 6445 - Got a few questions
Pics of my machine are included there.
So, I’d asked at the time what motors to use and never got a good usable model number to order. It took me months of research to figure it out as I was starting from zero knowledge.
I finally figured out what I needed for motor size and model number.
Learned a bunch. But it was VERY SLOW to figure it out on my own. So I’m posting this for others benefit.
In my machine I have NEMA 17 sized motors. See the first post above for pics and model number details.
I chose 2 phase open loop stepper motors and stepper drivers (DM542). I wanted only 4 wires and not have to deal with 6 wires.
I’ve been trying to use my machines stock motors as is with my new Ruida controller but the motors just seem to skip around without proper grab. I think maybe I don’t have the acceleration settings figured out but no idea how to begin to get the right settings. And they run hot even with the drivers on the lowest setting and half power switch engaged.
Perhaps the voltage on the stock ones are only 12v and since I’m running a 24v PSU it’s too much?
So I purchased the docs from the guy who designed his own laser build (Further Fabrication y-1200) and sells the parts list. Based on that I found some good stepperonline motors based on the links in his docs.
Then I learned that my laser has .09 degree motors which are supposedly more precise than the much more common 1.8 degree motors available nowadays. So I ended up ordering both to play with.
Didn’t notice that the Y axis motor is actually a dual shaft until this week.
So did another day of research to find one that would fit and work. Takes a long time to find this stuff!
So I have to wait another week for those to arrive now.
1.8 degree stepper motors I ordered:
Y Axis - Dual shaft stepper online Model 17HS19-1684D
X Axis - Stepper Online Model 17HS19-2004S1
0.9 degree stepper motors I ordered:
Y Axis - Dual Shaft Stepper Online Model 17HM19-1684D
X Axis - Stepper Online Model 17HM19-2004S1
These are much higher rated amperage wise than my stock ones, so they shouldn’t get hot like my current ones. I hope anyway that fixes the overheating issue.
I plan to test out the 1.8 degree first as that is what his docs used and so I can use his settings, then ‘upgrade’ to the 0.9 degree version motors in a month or so and see just how much more detail is derived when doing photo etching. I’ve seen some pics where it was a very noticeable increase in detail.
Thoughts?
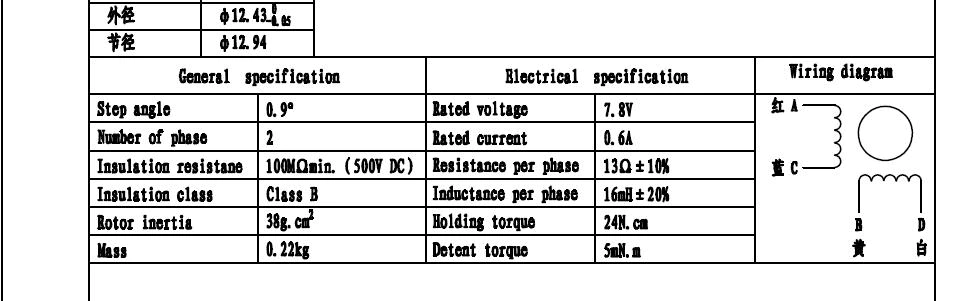
Also, here’s the ONLY spec info I could find on my current motors anywhere online.
Stepping Motor Type 17HA704Y-1A1 Smooth TM
They seem to be rated at only 0.6A 7.8v. Pretty low powered it seems.
For the Z Axis height adjustment I ordered a stepper motor to replace the regular electrical motor that came stock with the unit.
But I made a mistake on the first order and didn’t notice I’d ordered a 36Volt model.
I could make it work, but then I’d have to add a 36V PSU and I already have a 24v, 12v and 5v I’ve added to handle all the current components. I don’t really want to add a fourth PSU.
Here was the 36V one I ordered by mistake:
Here’s the new 24V one I ordered this week:
I also ordered a 10 Tooth sprocket with a 6.35mm shaft hole to match the above motor.
MAKE SURE YOU MATCH YOUR GEARS/SPROKETS TO YOUR MOTOR SHAFT SIZE!
So now I should have usable parts that will fit my machine and Ruida controller. Phew!
Only took me a year to figure out what to order!
Posting this for my own future reference and to help others with the same struggles.
Key words to make search easier later:
How to choose stepper motors.
How to choose the correct stepper motor and stepper driver for your chinese c02 laser.
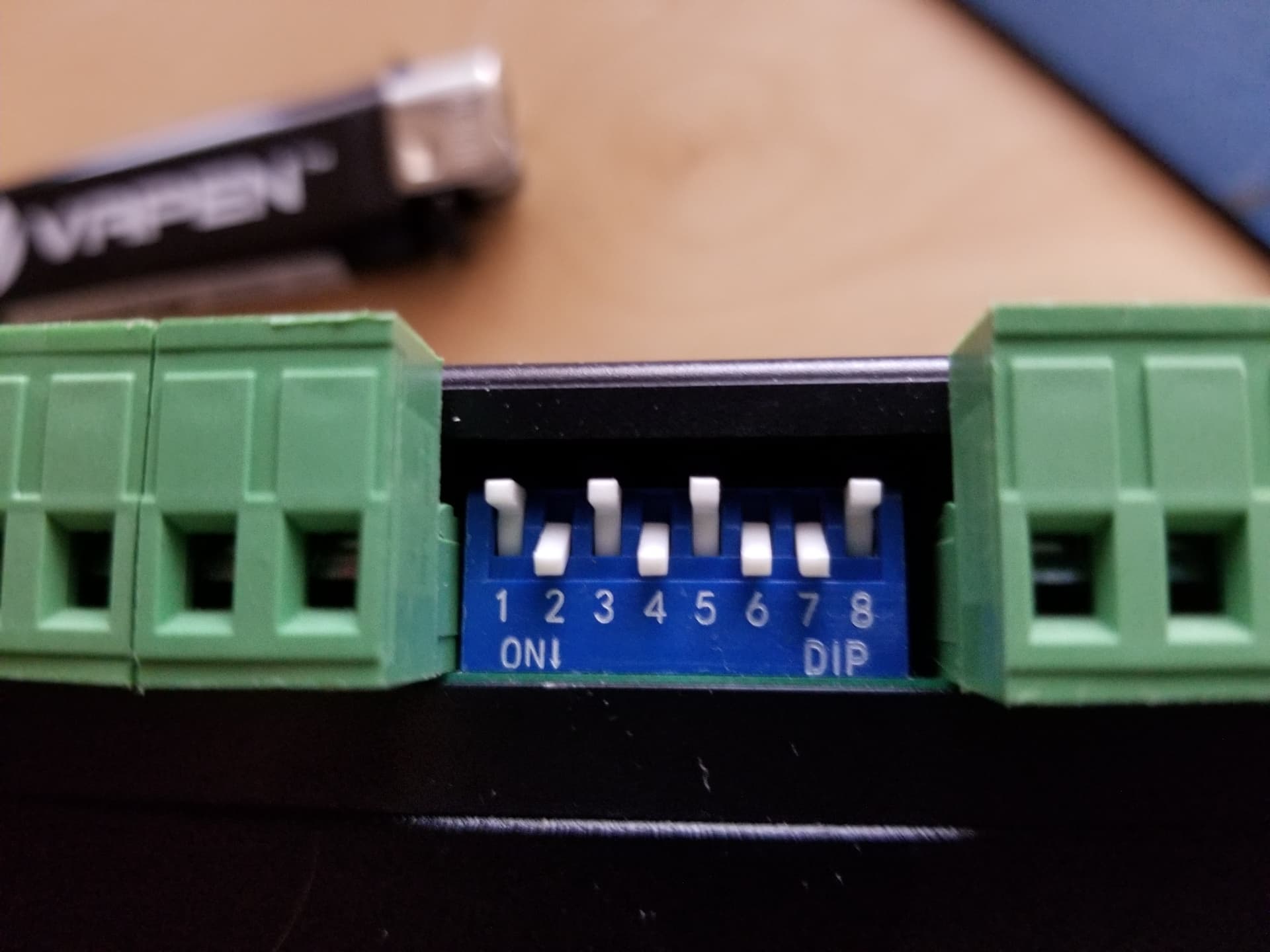
Ensure you are reading the motor driver switches properly… they are usually ‘on’ when switched towards the circuit board of the driver. There is also a ‘on’ direction printed on the driver.
My motors were hot also and the factory had the motor drivers set for twice the current as specified in the data sheet… I reduced them with little change in operation… Had to lower the acceleration a tad, down from 65,000mm/s^2 to 50,000mm/s^2… I can still run 1650mm/s with no issues.
So, are you using NEMA17 or NEMA23s?
You will have to compute some settings or ‘guess’ at them, but it should be doable.
I just received the motor for the Z yesterday. Still waiting for one more 0.9 degree motor for the X before I can begin. But I’ll definitely post some more pics and info as soon as I can. Thank you.
This is the most popular Nema 17 stepper motor in 3D printer market, with 1.8° step angle (200 steps/revolution). Each phase draws 1.68A, allowing for a holding torque of 44Ncm(62.3oz.in). It’s very good choice for 3D printer, a rear shaft is made…
This high torque and precision bipolar Nema 17 stepper motor with 0.9° step angle (400 steps/revolution). Each phase draws current 2A, allowing for a holding torque of 46Ncm(65.1oz.in). Electrical Specification * Manufacturer Part Number:…
Well, my stepper motor from Amazon still isn’t here. Ordered it 17 November and it’s now 17 December. They say I have to wait until the 20th before I can request help on it. Fun times. Waiting…
Amazon… they never sent the replacement that I’d requested via chat that day. So I asked again and they gave me a $10 credit to a future order and cancelled my order and gave me a gift card refund for the $20 purchase price of this motor. But now I’m 6 weeks now without a motor and still haven’t got another one on order yet to replace it. Damn… First time I’ve ever really had an issue with amazon so I guess I can’t complain. I’ll have to order another now. This project is now way overdue because of them though now.
Yep. True. So I’ve actually got some 0.9 degree motors I can use from stepper online. Are the settings very different to using 1.8 degree steppers? I plan to dig into the rebuild again this weekend and hope to be able to get some example settings to use to input into my ruida 6445 so they’ll just work right out the gate. Any settings lists available I could use to plug them in?
This is over a year old, but it’s the earliest configuration I have for my machine. All the ‘vendor’ settings could be unique … Use it at your own risk…
No perspiration… Make sure you make a backup so you don’t lose the initial configuration. Backups can be deleted… it’s easier to have it than to have nothing.