Hello, I’m having SCULPFUN S30 ULTRA MAX. It’s working area is 600x600mm and I’d like to expand it for 1000x1000mm or more. However I live in a flat and I have limited space in my workshop
I want to mount it vertically on a wall so I bought linear rails with ball screw to prevent laser from faling or moving based on gravity. And this brings me to this issue. When I switch for ball screw I can not any more move laser freely by hand and I have to do it only via LIGHTBURN. So I had an idea to connect my PS5 controller to PC and it worked even on a stick (analog axis) but only as a button. Motion wasn’t fluent, it was lagging. Would it be possible to set up analog stick to change speed and distance automatically based on input tolerance (sensitivity) of the stick?
I’d like to controll laser movement on my sticks and it should be fluent.
I think the best way would have been to stay on the belt-driven mechanics and just build a holder to keep the module in safe position when the frame is upright. A ball screw mechanics is way slower than the original one.
I can’t help with the issue of the controller, I never used one
Gravity -coupled with the inertia of the gantry and the head- will however create problems on the Y axis accuracy eventually unless You are willing to switch to a closed loop position feedback operation.
If Your current controller doesn’t support that feature, You have to find one that does.
If Your accuracy demand is lower than the accuracy of the motion, indirect feedback will probably suffice.
If not, the cost and complexity will increase quite substantially if direct feedback is required.
I don’t have any knowledge about that controller either, but in theory a proportional control shouldn’t be a problem.
Those have been around for ages.
Insisting to use an analog joystick may pose more problems than solve them though.
Because that requirement will most likely require at least some specific hardware (binary joystick or A/D converter?) and//or special code to handle the proportional side of the control.
I’m intrigued how this will develope.
If You can get it working, I’d imagine it’d solve the space problem most hobby laser users are faced with.
A proportional joystick control would be nice to have even if the laser bed is horizontal.
Another thought, perhaps You can tap into the LB jog control with a normal digital PC joystick?
I assume that the PS5 controller isn’t as bare-bones as a “normal” gaming joystick, the jaggedness of the movements are probably caused by incorrect data being sent to LB.
MOTION:
I have checked that closed loop position feedback you have mentioned. I honestly don’t think that will be a problem for me. I bought ball screw that is for milling machine and as claimed (no tolerance in movement) of corse in some microns there will be some but I believe it’s more than sufficient for my project. I know it can get expensive but I just like that IDEA and I wanna try what I can to test if it’s possible.
Ball screw is 16x2 so it’s D = 16mm and the thread difference is 2mm. For one turn of the ball screw (house) will move of 2mm. I have made a test and I had to recalibrate the controller. When I compered the settings there was difference in steps about 8,** times slower than original. It was OK however I have possibility to engrave on 8000 mm/min for engreaving lines and I’d like to use the potential of machine. When I put speed for 6000, motors went crazy cause they spin instead of original 6000 mm/min 8.** times faster for same distance and it’s not sutable.
That’s why I’ve ordered some pullys for a GT2 belt with T20 and T60 to give me a transmition back but keep advantage of ball scree on Y axes and prevent laser from faling down. I’ll gain more wisdom after I try this solution and will provide my feedback. Also I’d like to mention that I have to use belt with tension because I’m afraid that I would gain some backlash from that.
CONTROLLER:
Regarding the controller I don’t think it matters what controller you are using. If it’s PC or PS5 with emulator. In this case I think it’s only matter of LIGHTBURN. I did bind the movement for controller buttons same as for sticks and it was working. I think the problem is in input controll. Since you have to put parameter before you make a command like DISTANCE and SPEED it’s pre set. It will run the command and than wait for another input. Stick behave as same as button. If I hold it down it goes but it’s lagging. There’s a “big” waiting time between the commands. Also it doesn’t metter if the stick is pulld to MIN or MAX trigger it still runs the pre set command.
Personally I think it should be possible “only” by changing settings that based on input from controller potentiometer and based on this values calculate speed automatically up for infinite distance until you stop pushing or hit the limit switch. It’s something like when you use accelerators. Laser has to go to one possition but fulently will increse speed and than lower based on commands and there’s almost no waiting time between the commands.
I’m having a little soul here that LB can think of it
If you think something won’t go as I plan here please let me know your ideas.
Hello, Yes this topic was here somewhere but I couldn’t find it so here it is.
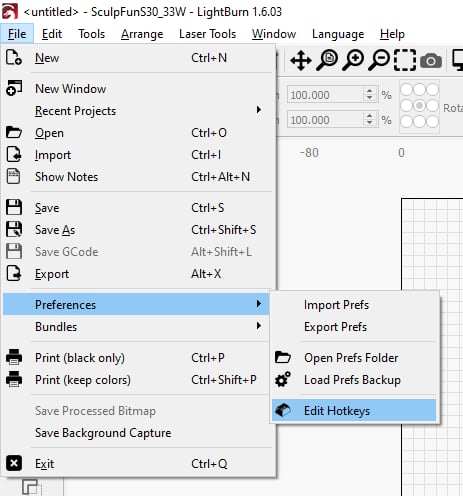
File => Preferences => Edit Hotkeys
Look for “JOG” and there you have it. Just click on movement that you wanna bind and than on a bottom is shortcut (text input field) press any button or combination of multiple buttons and it should work
Wohoooooo!!! I got it So on other theme I was told that there is difference between custom key jog and the one binded on NUM pad. And yet I have found a video how to do what I want however theres 2 settings that has to be turned on in order to move that
It will matter to Lightburn. I doubt if you can get the Lightburn Dev Team to write a post processor for a one-off machine. Choose a 32-bit controller that runs GRBL or GrblHAL and you will have a fair chance of succeeding.
I suggest you go out to local machine shops and see how the big boys (Fanuc, Bridgeport, Mori Seiki, Haas, Okuma, Fadal, and so on…) design their machines.
First, apologies for not replying sooner, it’s been a rather hectic couple of days.
You’re welcome, both ideas are quite intriguing.
Hopefully not, but it’s something that You have to keep in mind.
Especially if You intend to gear up the stepper motor, since doing that reduces the available torque.
When the torque requirement of the gantry going up (and down) the “Y” axis eventually exceed the torque capability of the stepper motor, You’ll miss a step.
Without a closed loop feedback, the head won’t be where the software assumes it is when that happens.
The software have to be able to make sense of the commands the joystick/pendant/keypad/etc. sends (hence the tricks in the video You posted), and if proportional movement is required, things get rather complicated rather fast.
However, if the jog control device just taps into the LB’s incremental jog control with predetermined increments, things are rather easy as can bee seen in that video You posted, but that’s not quite what You originally wanted to do.
A time-based (how long the direction “key” is pressed) acceleration and fixed deceleration could probably be possible to code into the LB’s jog control or a standalone code, but that would probably require skills that are beyond the capabilities of most of us.
Or not, there’s all sorts of geniuses in here .
That kind of a feature could actually be beneficial for some, so perhaps a feature request should/could be made to include something like that in the LB jog control?