Hi all i am using a k40 with a cohesion 3d board and i need to calibrate the settings as when i cut a 25m x 25mm square the y axis is coming out at 24mm please help as i cant find the calibration tool that you see on youtube
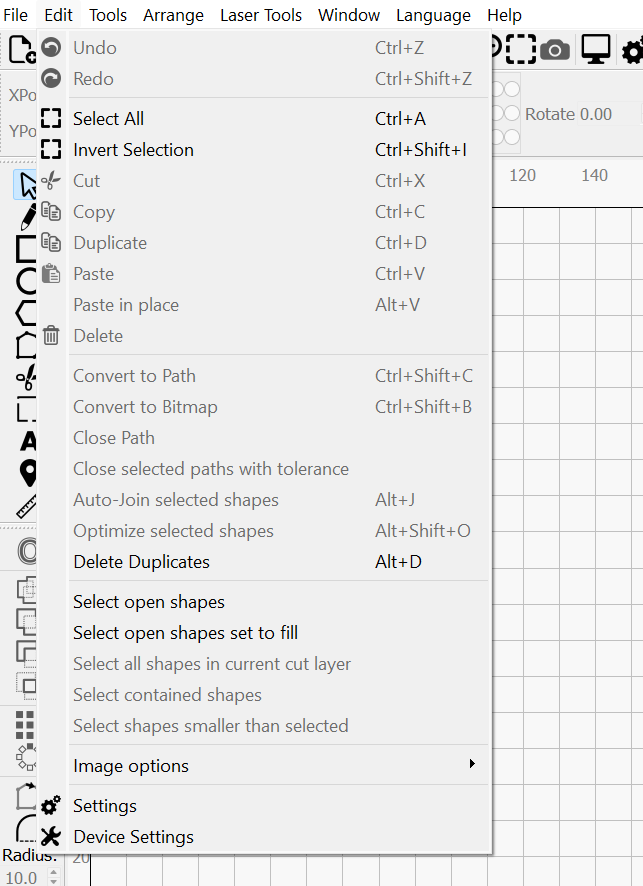
First, open the Machine Settings window, go to Edit>Machine Settings.
In the Machine Settings, you’ll find the option to calibrate your axis:
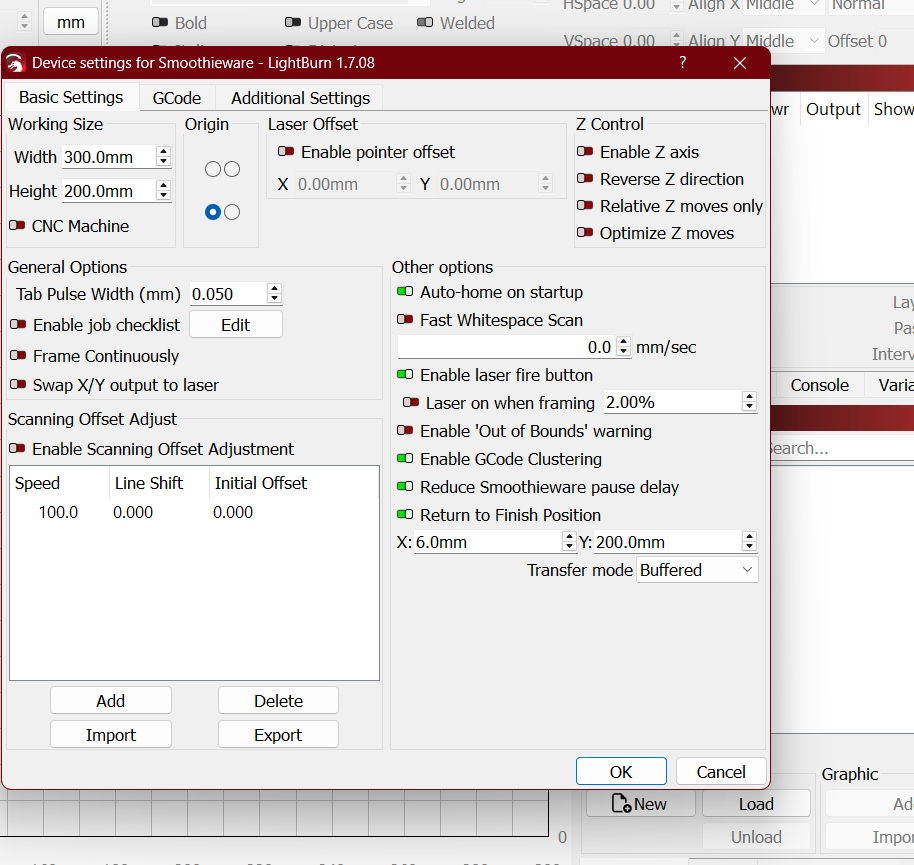
as you can see from the screen shot when i go onto the machine settings there is no edit axis button
You’re looking at device settings. Machine settings is found under the edit menu.
I looked in there as well and all i get is exactly the same. All the images i have shown are fron the edit menu

All i see is device settings and settings
No machine setting ican at all
In trying to figure out why you don’t see machine settings. I created a Smoothieware profile. It does not list machine settings. This is beyond my knowledge.
If you’re running one of the 2.0 RC versions, then Machine Settings have moved to Laser Tools:

Machine Settings is not available for lasers using Smoothieware.
From our docs: “The Machine Settings window allows you to view and edit firmware settings on lasers with Ruida, TopWisdom, or GRBL-based controllers.”
Can you provide a screenshot of your devices window? What controller do you have in your K40?
1 Like
T.I.L. ![]()
The information in this thread may help you.
Calibration of the Cohesion 3D board is done by editing the config file on the SD card (make a copy before changing anything!) I don’t have access to the laser at the moment so can’t remember the exact settings but it will be something like “steps per mm” or maybe “steps per degree” for the X and Y axis (I think it may be called A, B and C rather than X Y and Z) change it and see what changes.
Shut off the machine, take the SD card out and put it in a reader on your computer, and edit the config file.
This is the section you need to adjust. Ignore my values below, yours are probably all 157.575.
Alpha,Beta and Gamma below correspond with X,Y and Z.
Use one of the online calculators to figure out what your should be. This one works pretty well.
https://makerhardware.net/steps-per-mm-calibration-calculator/
Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
alpha_steps_per_mm 157.575 # Steps per mm for alpha stepper
beta_steps_per_mm 315.150 # Steps per mm for beta stepper
gamma_steps_per_mm 3169.000 # Steps per mm for gamma stepper
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.