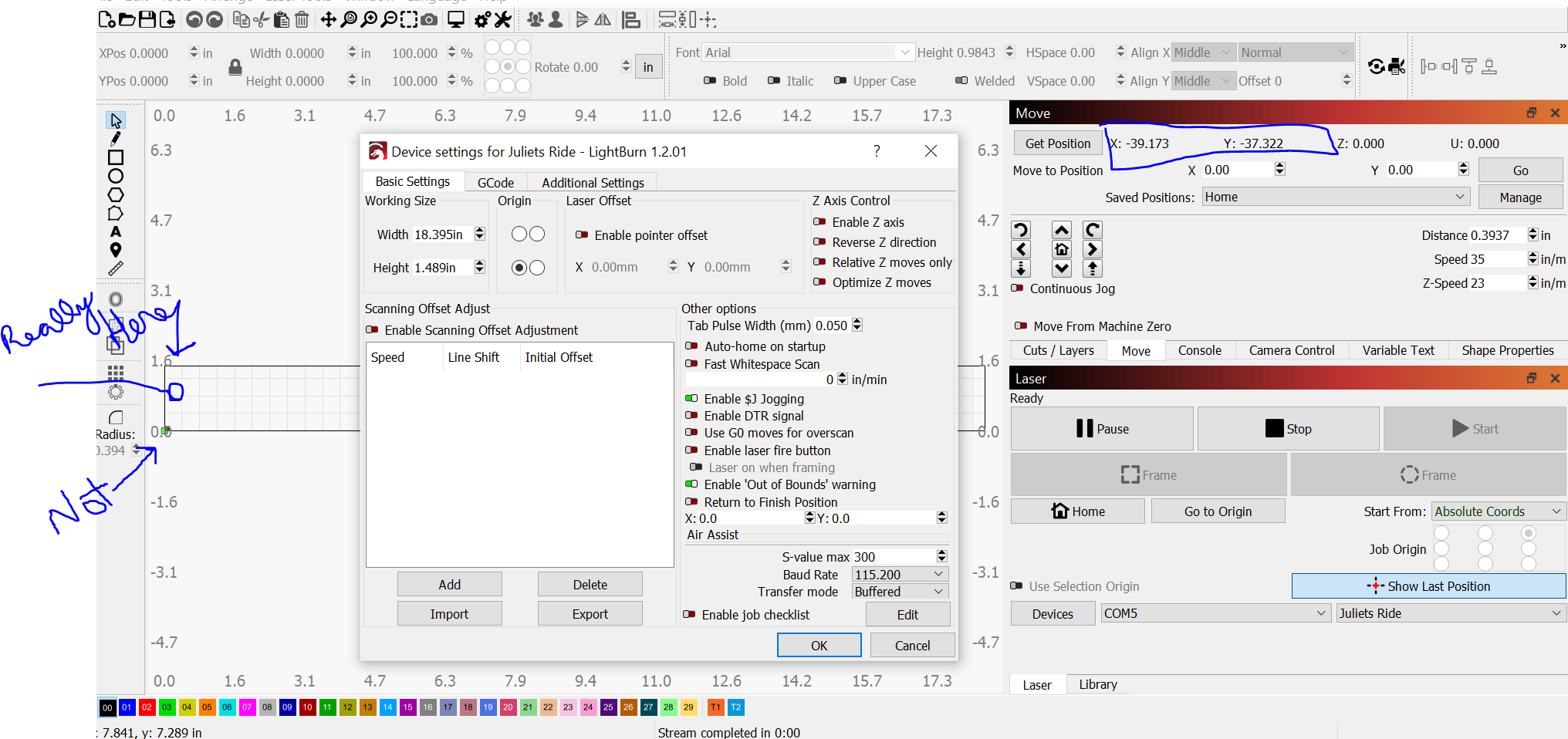
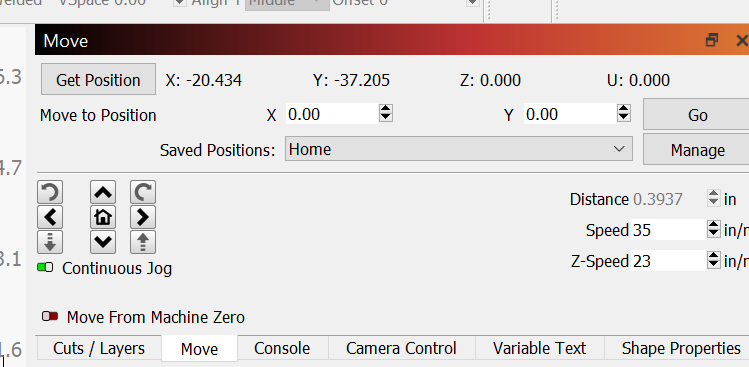
I connected and homed which brought it to front left. backed it up and the told it to come forward and it again went back. here is my console data and pic of settings.
Waiting for connection…
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
error:9
G-code locked out during alarm or jog state.
[MSG:Caution: Unlocked]
ok
[VER:1.1g.20181112:CUSTOM]
[OPT:V,15,128]
Target buffer size found
ok
ok
$#
[G54:-995.003,-995.003,0.000]
[G55:0.000,0.000,0.000]
[G56:0.000,0.000,0.000]
[G57:0.000,0.000,0.000]
[G58:0.000,0.000,0.000]
[G59:0.000,0.000,0.000]
[G28:-300.050,-1.425,-20.000]
[G30:-337.372,-9.096,-20.000]
[G92:0.000,0.000,0.000]
[TLO:0.000]
[PRB:0.000,0.000,0.000:0]
ok
?
<Idle|MPos:-995.003,-995.003,0.000|FS:0,0|WCO:-995.003,-995.003,0.000>
ok
<Idle|MPos:-995.003,-995.003,0.000|FS:0,0|Ov:100,100,100>
ok
<Idle|MPos:-995.003,-995.003,0.000|FS:0,0>
ok
<Idle|MPos:-995.003,-995.003,0.000|FS:0,0>
ok
Starting stream
Stream completed in 0:00
ok
<Idle|MPos:-995.003,-985.003,0.000|FS:0,0>
ok
<Idle|MPos:-995.003,-985.003,0.000|FS:0,0>
ok
Starting stream
Stream completed in 0:00
ok
<Idle|MPos:-995.003,-975.003,0.000|FS:0,0>
ok
<Idle|MPos:-995.003,-975.003,0.000|FS:0,0>
ok
Starting stream
Stream completed in 0:00
ok
ALARM:1
Hard limit triggered. Machine position is likely lost due to sudden and immediate halt. Re-homing is highly recommended.
[MSG:Reset to continue]
Grbl 1.1g [‘$’ for help]
[MSG:‘$H’|‘$X’ to unlock]
[MSG:Caution: Unlocked]
ok
ALARM:1
Hard limit triggered. Machine position is likely lost due to sudden and immediate halt. Re-homing is highly recommended.
[MSG:Reset to continue]
Grbl 1.1g [‘$’ for help]
[MSG:Check Limits]
[MSG:‘$H’|‘$X’ to unlock]
[MSG:Caution: Unlocked]
ok
$0=8
$1=255
$2=0
$3=5
$4=1
$5=0
$6=0
$10=1
$11=0.020
$12=0.002
$13=0
$20=0
$21=1
$22=1
$23=3
$24=100.000
$25=300.000
$26=250
$27=5.000
$30=300
$31=0
$32=0
$100=199.100
$101=199.100
$102=199.100
$110=2500.000
$111=2500.000
$112=2500.000
$120=150.000
$121=150.000
$122=150.000
$130=1000.000
$131=1000.000
$132=100.000
ok
?
<Idle|MPos:-995.003,-947.971,0.000|FS:0,0|Pn:Y|WCO:-995.003,-995.003,0.000>
ok
<Idle|MPos:-995.003,-947.971,0.000|FS:0,0|Pn:Y|Ov:100,100,100>
ok
<Idle|MPos:-995.003,-947.971,0.000|FS:0,0|Pn:Y>
ok
<Idle|MPos:-995.003,-947.971,0.000|FS:0,0|Pn:Y>
ok
<Idle|MPos:-995.003,-947.971,0.000|FS:0,0|Pn:Y>
ok